eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Jungchul Park
10.5143/JESK.2017.36.6.665 Epub 2017 December 28
Abstract
Objective: The aim of this study is to review the existing studies on the user interface of advanced driver assistance systems (ADAS), especially focusing on the transitions of control authority. It also suggests some implications for the interface design.
Background: With the advent of autonomous driving and the increasing adoption of ADAS, the importance of ergonomic design for the driver interface of ADAS is increasingly emphasized.
Method: In this study, recent studies on the ADAS interface were reviewed in three aspects (the effect of automation level, the display design/evaluation, and control design/evaluation). Existing models of the allocation of control authority between driver and vehicle were also examined.
Results: Various results have been obtained due to differences in experimental conditions and environments. However, in general, as the level of automation by ADAS increases, the workload decreases, while the level of situation awareness decreases and the response time increases. Motivations for the control authority transition and implications for the interface design are discussed.
Conclusion: The interface that effectively monitors and presents the performance and conditions of the driver and the system is expected to provide assistance in various situations of authority transition.
Application: The results of this study might help to explore, understand, and refine related research topics.
Keywords
Advanced driver assistance systems (ADAS) User interface Control authority Automation
최근 들어 차량의 자율주행이 전세계적으로 많은 주목을 받고 있다. Google, nVIDIA 등 IT 기업들을 비롯해 Tesla, Mercedes-Benz, BMW, Volvo 등 대부분의 자동차 제조사들이 자율주행 차량을 개발하고 이를 도로 상에서 테스트하고 있다. 최근 약 30년간 부분적인 자율주행을 지원하는 첨단운전지원시스템(Advanced Driver Assistance Systems, ADAS)이 개발되어 왔다. 이는 자동긴급제동(Automatic Emergency Brake, AEB), 주의분산방지시스템(Attention Assistance System), 충돌경고시스템(Collision Warning Systems), 적응형 크루즈 컨트롤(Adaptive Cruise Control, ACC), 차선유지보조시스템(Lane Keeping Assistance System, LKAS), 자동주차(Automatic Parking) 등을 포함한다. Table 1은 ADAS의 주요 기능을 나타낸다. 현재 대다수의 자동차 제조사들이 ADAS에 대한 연구 개발을 지속적으로 추진 중이며, 위에 언급된 기능들을 최근 출시하는 자사의 양산 차종 중 일부 모델에 포함시키고 있다.
|
Function |
Description |
|
Automatic Emergency Brake
(AEB) |
Automatically brakes when
collision is imminent |
|
Attention Assistance
System |
Provides alarm by judging the
driver's attention level |
|
Collision Warning Systems |
Provides warning if a
crash hazard is detected |
|
Adaptive Cruise Control (ACC) |
Accelerates or decelerates the vehicle according to the speed set
by the driver and the distance from the preceding vehicle |
|
Lane Keeping Assistance System (LKAS) |
Recognizes lanes, warns when leaving the lane, or automatically
operates the steering wheel to drive along the lane |
|
Automatic Parking |
Recognizes parking space
and parks automatically |
이러한 ADAS의 기능들은 운전 작업의 부담을 덜어주거나, 위험한 상황에서 운전자를 보조함으로써 운전자의 편의와 안전을 크게 향상시킬 수 있다. 현장에서의 실험 연구에 따르면, ADAS는 도로 교통의 효율을 높이고 연료 소모를 절감할 수 있는 효과가 있으며, 전체의 50% 이상을 차지하는 비의도적인 인적 오류(Treat, 1979)에 의한 교통 사고를 줄일 수 있다(Kuehn et al., 2009).
ADAS가 제공하는 것과 같은 기능의 자동화는 일반적으로 여러 장점을 가지고 있지만, 단점 또한 존재한다. 대부분의 기능이 자동화되면 인간 작업자가 긴장감을 상실하기 쉬우며, 상황인식을 지속적으로 유지하기가 어려워지고, 수동 조작의 기술도 점차 잃을 수 있다. 따라서, 비정상적인 상황 등으로 인해 자동화가 제대로 동작하지 않을 때 사람의 대처가 늦거나 미숙해 질 위험이 커진다. 이를 "인간 배제(human-out-of-the-loop)" 문제라 한다(Kaber and Endsley, 1997; Parasuraman and Riley, 1997). de Winter et al. (2014)는 다양한 연구를 검토한 결과, 운전의 자동화 수준에 따라 운전자의 작업부하의 정도와 주행 상황에 대한 인식 정도가 크게 달라진다는 결론을 내렸다. 따라서, 자율주행 차량의 인터페이스를 설계할 때, 반드시 자동화 수준의 증가로 인한 인간공학적 문제점들이 충분히 고려되어야 한다.
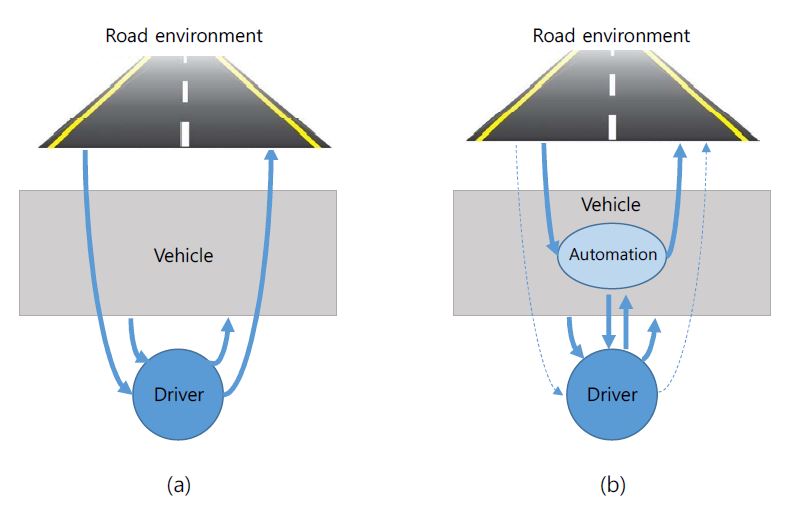
Figure 1은 운전자가 수동으로 운전하는 상황과 자동화 시스템이 작동하는 상황에서 발생하는 운전자와 차량 간의 상호작용을 도식적으로 표현한 것이다. 수동 운전 상황에서 운전자는 도로 환경(도로, 교통신호, 주위 차량의 움직임 등)과 자신의 차량에 대한 정보를 차량을 통해 받아들이고 차량을 제어함으로써 자신의 차량에 대한 상대적인 도로 환경을 변화시킨다. 그러나 어느 정도 수준 이상의 ADAS의 도움을 받는 경우에는 차량 내의 자동화 시스템이 이러한 상호작용의 상당부분을 대신 처리한다. 이는 사용자 입장에서 상호작용의 양이 줄어들면서 보다 편의성이 높아진다는 장점이 있다. 그러나 앞서 언급한 바와 같이 자동화 시스템이 도로 환경과 상호작용하는 부분이 강화되면서 운전자가 이러한 상호작용에서 배제되는 human-out-of-the-loop 문제가 발생할 수 있다. 또한, 수동 운전에서는 존재하지 않았던 자동화 시스템과의 상호작용이 새롭게 요구되어 질적인 측면에서 보다 다양하고 복잡한 상호작용이 요구된다. 이러한 복잡성의 증가를 상쇄하기 위해서는 새로 부과되는 자동화 시스템과의 상호작용에 적합하도록 인터페이스를 설계해야 하며, 두 가지의 다른 상호작용 간에 자원의 배분과 권한의 이양이 용이하도록 도울 수 있는 인터페이스의 설계가 필요하다.
이를 위해 본 논문에서는 ADAS의 도입에 따른 운전자 인터페이스의 인간공학적 설계에 관해 기존의 연구들을 검토하고, 그 중에서도 특히 문제가 될 수 있는 운전자와 자동화 시스템 간에 제어권이 이양되는 상황에 대하여 보다 상세한 분석을 통해 상황의 유발 동기와 그에 따른 인터페이스 설계의 시사점을 제시하고자 한다.
본 연구에서는 ADAS의 인터페이스 사용성에 관하여 서적, 논문, 웹사이트 등에 대한 문헌 조사를 수행하였다. 논문 검색을 위한 데이터베이스와 검색엔진으로는 ScienceDirect와 Google Scholar를 주로 사용하였으며, 'Driving', 'Driver', 'Assistance', 'Automation', 'Automated' 등의 키워드를 조합하여 검색을 수행하였다. 검색된 논문들에 대해 Abstract 위주로 1차 선별을 거친 후 본 논문의 내용과 밀접한 관련이 있는 논문들을 심층적으로 검토하였다. 검색된 자료에서 인용한 문헌 중 관련성이 높은 문헌들을 추가로 검색하여 가능한 많은 관련 문헌들이 포함될 수 있도록 하였다. 자동화 수준이 운전에 미치는 영향에 대해 다수의 연구들이 있었으며, 그 외의 연구들은 논의의 편의를 위해 ADAS의 사용자 인터페이스 중 디스플레이의 특성을 다루는 연구와 조작장치의 특성을 다루는 연구로 분류하였다.
2.1 Effects of automation
자동화의 수준이 높아짐에 따라 작업부하가 감소하지만, 부차적인 작업에 더 많이 관여하게 되고, 도로 환경에 대한 상황인식의 수준이 낮아지며, 이에 따라 운전자의 반응시간이 증가한다는 데 대해 대부분의 연구들이 일치된 결론에 도달하고 있다(Endsley and Kaber, 1999; Bashiri and Mann, 2014). Stanton and Young (2005)의 연구에 의하면, 수동 운전에 비해 자동화된 운전이 통상적으로 운전 작업의 부하를 줄여주는 것으로 나타났으며, 교통량이 많을 때 운전 작업의 부담이 높으므로, 자동화된 운전이 교통량이 많을 경우에 특히 이점이 큰 것으로 나타났다.
그러나, 자동화의 수준이 높을수록 운전자가 수동 운전으로 전환하기 위한 상황인식을 되찾는 데 걸리는 시간이 증가한다(Damböck et al., 2013). Nilsson (1995)과 Stanton et al. (2007)의 연구에 따르면 적응형 크루즈 컨트롤을 사용하는 차량의 운전자들이 차량의 충돌을 피하기 위해 개입하는 시점이 다소 늦는 경향이 있었다. Rudin-Brown and Parker (2004)는 ACC 사용에 따른 운전자의 행동 패턴 변화에 대해 연구한 결과, ACC를 사용하는 운전자가 부차적인 작업(Secondary task)에 더 많이 관여하고, 위험 상황에 대한 반응시간이 느려진다는 것을 밝혀냈다. Zeeb et al. (2015)는 시뮬레이터 상의 자율주행 환경에서 운전자의 시각적 주의 배분이 응급 상황에 따른 제어권 이양에 어떻게 영향을 미치는지에 대해 연구하였다. 자동주행 중 운전자가 시각적 주의를 요하는 부차적인 작업을 동시에 수행하는 동안 시선의 움직임을 기록하고, 권한 이양 상황에서의 반응시간을 측정하였다. 시선 움직임의 크기에 따라 위험도를 구분하였을 때, 위험도가 높을수록 권한 이양에 대한 반응시간이 길어진 반면에, 신체적인 준비 정도에는 영향을 미치지 않는 것으로 나타났다. 한편, Larsson et al. (2014)은 운전자들이 ACC에 익숙해지면 시스템의 한계에 대해 더 잘 알게 되어 위급 상황에 더 빨리 반응할 수 있다고 주장하였다.
2.2 Design and evaluation of displays
차량의 디스플레이는 운전자에게 외부 도로 환경과 함께 시스템의 작동을 사용자가 명확하게 파악할 수 있도록 정보를 전달해야 한다. 기존 연구에 따르면, 자동 시스템의 의도를 알게 하고 한계를 인식하게끔 하는 인터페이스를 통해 수행도를 높일 수 있다(Young and Stanton, 2007; Kaber et al., 2006; Inagaki, 2006).
디스플레이의 위치나 디스플레이가 제공하는 정보의 양식, 형태, 제공 시점 등에 대해 다양한 연구가 이루어져 왔다. Brookhuis et al. (2008)은 자율주행 상태의 표시를 위한 디스플레이가 차량 내의 어느 위치에 배치되어야 하는지에 대해 연구하였다. Stanton et al. (2011)은 적응형 크루즈 컨트롤에서 레이더 형태의 디스플레이가 단순한 아이콘 형태의 디스플레이보다 복잡하기는 하지만 더 많은 정보를 제공함으로써 선행 차량의 변경을 쉽게 파악할 수 있게 한다고 하였다.
경보의 양식에 따라서도 수행도가 달라질 수 있다. Biondi et al. (2017)은 경보가 청각과 촉각, 다중감각(청각과 촉각)으로 제공되는 조건을 비교하여, 다중감각을 활용한 중복적 경보의 제공이 운전자를 당황시키지 않으면서 긴급성을 느끼도록 하여 브레이크 반응시간을 줄일 수 있다고 하였다. 이와 유사하게, Naujoks et al. (2014)는 시각과 청각을 동시에 활용한 경보 방법이 시각적 경보에 비해 운전자의 반응시간을 감소시킬 수 있다는 것을 밝혀냈으며, Stanton and Young (2005)의 연구에서도 음성 피드백과 함께 계기판에 시각 피드백을 제공하였을 때 운전자의 상황인식 수준이 가장 높은 것으로 나타났다. 그러나, Biondi et al. (2014)는 갑작스러운 비프(Beep)음의 제시가 운전자의 주의를 분산시키고 경로를 일시적으로 이탈하게 하는 부정적 효과가 있다고 하였다.
또한, 경보가 제공되는 시간이 짧을수록 권한의 이양이 원활하게 이루어지기 어려운 것으로 나타났다(Merat et al., 2014; Gold et al., 2013; Strand et al., 2014). Gold et al. (2013)은 운전자의 손과 눈의 움직임을 기준으로 판단하였을 때, 운전자가 권한을 안전하게 물려받기 위해서는 최소 7초 전에 경보가 필요하다고 하였다. Merat et al. (2014)의 연구에서는 운전자의 행동에 대한 관찰을 통해 NHTSA Level 3의 자율주행 환경에서 운전자가 권한을 넘겨받아 안정적으로 주행하기 위해서는 약 40초 가량이 필요하다고 주장하였다.
2.3 Design and evaluation of controls
제어권의 이양이 보다 안전하고 효율적으로 이루어질 수 있도록 차량의 조작장치를 설계하는 것 또한 매우 중요한 연구 주제이다. 그러나 조작장치에 대해서는 디스플레이에 비해 상대적으로 적은 수의 연구들이 수행되어 왔다.
Levitan et al. (1998)은 자동 주행 모드에서 수동 주행으로 전환할 때 운전자들이 가속 페달보다 스티어링휠을 먼저 조작하는 경향이 있다고 하였다. Nilsson et al. (2013) 또한 자율주행 시스템이 실패하는 상황에서 운전자들이 브레이크보다 스티어링휠을 조작하는 것을 더 선호한다고 하였다. 그러나 이러한 스티어링휠 조작에 대한 선호가 더 효과적인 행동인지에 대해서는 아직 연구된 바가 없다.
Naujoks et al. (2015)는 부분적 자동주행 환경에서 운전자가 스티어링휠에서 손을 놓은 상태로 주행할 수 있는 시간이 10초인 경우와 120초인 경우를 비교한 결과, 양자 간에 위험 상황에 대한 반응시간에 유의한 차이가 없다는 결론을 얻었다. 이 연구에서는 Damböck et al. (2013) 등의 연구들과 달리 손을 떼는 시간이 더 길게 허용되는 조건에서도 운전자가 손을 뗄 것인지 아닌지를 상황에 따라 스스로 결정하도록 하였고, 시스템이 상황 발생 시 수동 제어를 요청하는 경보를 하도록 하였다. 이러한 조건은 보다 현실적이라 할 수 있는데, 이 경우 운전자들이 상황에 따라 적절하게 대응을 하기 때문에 이전의 연구들이 지적한 것만큼 문제가 되지 않을 가능성이 높다고 할 수 있다.
Lu and de Winter (2015)는 인간과 자율주행 시스템이 동시에 운전 작업을 수행하는 제어권 공유 방식이나 조작에 드는 힘을 서서히 변화시키는 방식과 같은 다양한 조작 방식들 간의 비교 연구가 필요하다고 제안하였다.
자동화 정도에 따른 자율주행의 수준(Level)에 대해서는 National Highway Traffic Safety Administration (NHTSA)의 5단계 분류와 Society of Automotive Engineers (SAE)의 6단계 분류가 주로 사용되어 왔다. 그러나 2016년 NHTSA가 SAE의 분류를 채택하기로 결정하면서 6단계 분류로 통일되었다(Table 2 참고). 이 분류에서는 조향(LKAS가 담당)과 가속/감속(ACC가 담당) 중 하나를 시스템이 수행하는 수준이 Level 1 (Driver Assistance)으로 분류되고, 조향과 가속/감속을 모두 시스템이 수행하는 현재의 사용화된 ADAS 수준을 Level 2 (Partial Automation)로 분류하고 있어, 낮은 수준의 자율주행에 대해서는 단계의 구분이 기존의 NHTSA와 거의 유사하다고 볼 수 있다.
|
Automation level |
Description |
|
SAE Level 0 No Automation |
The human driver does everything. |
|
SAE Level 1 Driver Assistance |
The automated system can sometimes assist the driver conduct some
parts of the driving task. |
|
SAE Level 2 Partial Automation |
The automated system can conduct some parts of the driving task,
while the driver continues to monitor the driving environment and performs
the rest of the driving task. |
|
SAE Level 3 Conditional Automation |
The automated system can both conduct some parts of the driving
task and monitor the driving environment in some instances, but the driver
must be ready to take back control when the system requests. |
|
SAE Level 4 High Automation |
The automated system can conduct the driving task and monitor the
driving environment, and the driver need not take back control. But the
automated system can operate only in certain environments and under certain
conditions. |
|
SAE Level 5 Full Automation |
The automated system can perform all driving tasks, under all
conditions that a driver could perform them. |
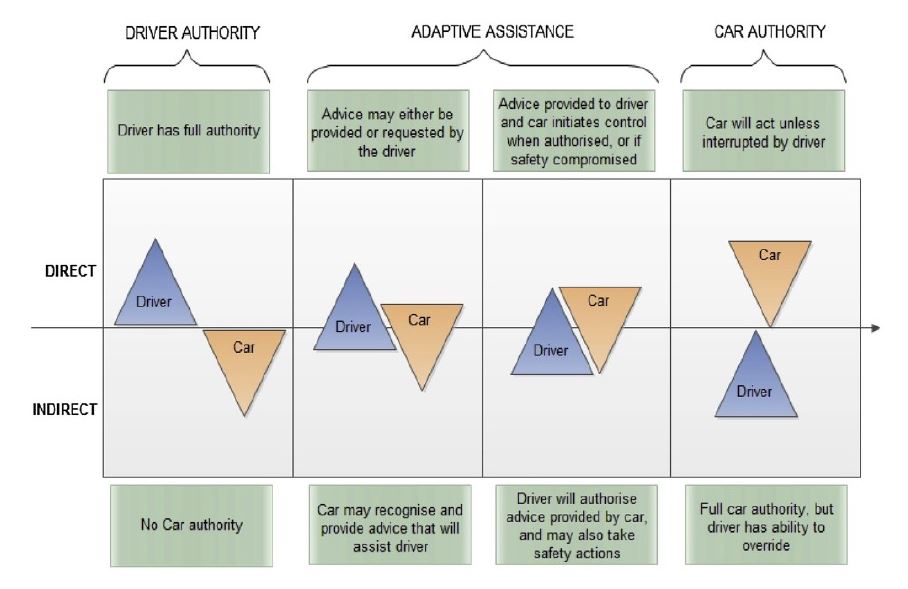
Richards and Stedmon (2016)은 Figure 2와 같은 운전자와 차량 간의 권한 위임 모델을 제시하였다. 이 모델은 운전자와 차량이 제어를 직접적으로 수행하는지 또는 간접적으로 수행하는지에 따라 4개의 단계로 자동화의 수준을 나누고, 이를 NHTSA의 5단계 모델과 매칭하였다. 그러나 이 모델은 권한이 배분되어 있는 상태에 대해서만 기술하고 있으며, 권한이 운전자나 차량 중 어느 한쪽에서 다른 한쪽으로 이동하는 상황에 대해서는 설명할 수 없다는 한계점이 있다.
Albert et al. (2015)는 주행 작업을 내비게이션(Navigation), 기동 가이드(Maneuver guidance), 경로 가이드(Trajectory guidance), 안정화(Stabilization)의 네 가지 수준으로 나누고, 운전자가 어느 수준까지 담당하는지에 따라 4가지의 설계 컨셉으로 구분하였다. 즉, 모든 수준을 운전자가 수행하는 수동 운전, 안정화 수준을 시스템에게 맡기고 경로에 대한 결정은 운전자가 내리는 경로 제어, 운전자가 기동을 계획하면 시스템이 그에 따라 경로를 결정하고 수행하는 기동 계획, 운전자가 목적지만 결정하면 기동에 대한 계획부터 경로, 안정화까지 모든 것을 시스템이 수행하는 자동 주행의 4단계로 구분하였다. 이 네가지 컨셉을 고속도로와 유사한 주행 환경에서 SAE Level 3에 해당하는 자동화 수준의 차량을 이용해 실험하여 비교한 결과, 운전자들은 편의와 만족을 높이기 위해 가능한 많은 작업을 자동화 시스템에 이임하는 것을 선호하였다. 이 연구는 자동화의 수준을 운전 작업에 보다 적합한 형태로 구분하였다는 점과, 가속/감속과 조향이 통합된 높은 수준의 자동화 단계에서 운전자들의 수용도를 분석하였다는 점에서 가치가 있다. 그러나 현재의 ADAS와 같이 가속/감속과 조향이 각기 따로 제어되는 낮은 자동화 수준에는 적합하지 않고, Richards and Stedmon의 모델과 같이 수준 간의 이동에 대해서도 설명력이 떨어진다는 단점이 있다.
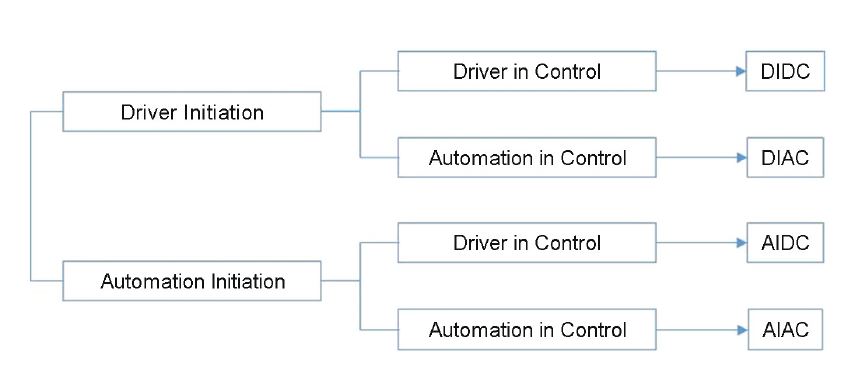
Lu and de Winter (2015)는 자율주행에서 제어권의 이양을 4가지 범주로 구분하였다(Figure 3). 제어권의 이양이 운전자의 요청에 의해 이루어지는 경우(Driver Initiation, DI)와 자동화 시스템에 의해 이루어지는 경우(Automation Initiation, AI)를 나누고, 권한 이양의 결과 제어권을 운전자가 갖게 되는 경우(Driver in Control, DC)와 자동화 시스템이 갖게 되는 경우(Automation in Control, AC)로 구분하였다. 이 두 가지 요인에 따라 모든 권한 이양의 상황을 그림과 같이 4가지 상황 중 하나로 분류하였다. 즉, DIDC는 자동화 시스템이 작동 중인 상황에서 운전자가 권한을 요청하여 넘겨받는 것, DIAC는 운전자가 스스로 제어권을 자동화 시스템으로 넘겨주는 것, AIDC는 자동화 시스템이 권한을 운전자에게 넘겨주는 것, AIAC는 자동화 시스템이 운전자의 운전에 개입하여 권한을 넘겨받는 것을 의미한다. Lu and de Winter의 모델은 위의 두 모델과 달리 제어권이 이동하는 것에 초점을 맞추고 있다. 이는 보다 구체적인 시나리오를 제공함으로써 제어권의 이양에 대한 동기를 파악하는 데 유리하고, 더 나아가 각각의 동기에 관련된 인터페이스 설계 이슈를 파악함으로써 시사점을 얻을 수 있다. 이에 대해 다음 장에서 보다 상세히 논의한다.
Lu and de Winter (2015)는 제어 권한의 이양을 4가지 범주로 나누고 각각에 해당하는 몇 가지의 시나리오들을 제시하였다. 그러나 이러한 시나리오들은 포괄적이지 않고 단순히 상황의 예시를 나열하는 수준에 머물러 있다는 한계점이 있었다. 본 논문에서는 Lu and de Winter (2015)가 제시한 제어권 이양의 4가지 범주 각각에 대하여, 해당 권한 이동이 어떠한 동기에 의해 유발되는지, 그리고 그러한 동기들이 인터페이스 설계 측면에서 어떠한 시사점을 제공하는지에 대해 보다 포괄적으로 분석하였다. 분석의 결과를 정리하면 Table 3과 같다.
|
Category |
Motivation |
Related interface design
implication |
|
Driver-Initiated Driver Control (DIDC) |
• Abnormality of the automation system • Low automation system performance |
• Providing information on the status and
performance of the automation system to assist driver judgment • Providing more natural ways of interaction
for initiating driver control |
|
• Driver's Self-awareness
on low level of situation awareness |
• Monitoring and displaying the driver's
situation awareness level in the automatic driving situation to assist driver
judgment |
|
|
•
Driver's pursuit of driving fun |
•
Provide information related to driving fun |
|
|
Driver-Initiated Automation Control (DIAC) |
• Abnormality of the driver • Low performance of the driver |
• Providing information on the driver's
condition and performance to assist driver judgment (e.g., degree • Clearly indicating the inability of the
automation system to take control |
|
• Driver's
pursuit of convenience |
• Providing more natural ways of interaction
for initiating automation control • Minimization of situation awareness
requirements and providing appropriate controls for driver convenience in
automatic driving situations |
|
|
Automation-Initiated Driver Control (AIDC) |
• Abnormality of the automation system • Low automation system performance |
• Providing information on the status and
performance of the automation system to assist driver's situation
awareness (e.g., sensor malfunctioning) • Providing display and/or control that
allows the driver to keep track of the situation and recover quickly • System judgment and response to situations
where the driver cannot accept the control authority |
|
• Detection of the driver's
low level of |
• Monitoring and alerting the driver's level
of awareness in the automatic driving situation |
|
|
Automation-Initiated Automation Control (AIAC) |
• Abnormality of the driver • Low performance of the driver (Automation
system judgment) |
• Providing information on the conditions
and performance of the driver to provide rationale |
|
• Pursuing efficiency of transportation |
• Providing information to help the driver
determine whether to approve the system's request |
DIDC는 운전자가 요청하여 자동화 시스템으로부터 권한을 넘겨받는 것인데, 이러한 상황은 흔히 운전자가 자동화 시스템보다 자신이 직접 운전하는 것이 낫다고 판단하는 경우에 발생한다. 즉, 자동화 시스템에 고장이 발생하거나 자동화 시스템이 제대로 상황에 반응하지 못한다고 운전자가 판단하는 경우, 또는 앞으로 다가올 상황에 자동화 시스템이 제대로 대처하지 못할 것으로 운전자가 예상하는 경우 등이다. 이러한 경우 자동화 시스템의 상태 및 수행도에 대한 정보(예: 차선이나 보행자 등 도로 상황에 대한 현재 시스템의 인식 상태)를 제공해 줌으로써 운전자의 판단을 보조해 줄 수 있다. 또한, 현재와 같이 브레이크 페달을 통해 ACC를 해제하거나 설정 변경을 통해 LKAS 옵션을 변경하는 방식 이외에, DIDC 상황에서 운전자의 제어 의사를 보다 자연스럽게 전달할 수 있는 새로운 인터랙션 방식을 고려해 볼 수 있다. DIDC는 운전자가 스스로 상황인식 수준이 낮다고 판단해 앞으로 발생할지 모르는 위험 상황에서 자신이 갑자기 대처하기 어려울 것이라 판단할 때에도 일어날 수 있다. 이러한 상황에서 운전자는 자동화 기능을 끄고 더 많은 제어를 본인이 직접 수행함으로써 자신의 상황인식 수준을 인위적으로 높일 수 있다. 이러한 판단에 도움을 주기 위해서는 자동주행 상황에서 운전자의 상황인식 수준을 모니터링하여 표시하거나 때에 따라 경보를 제공하는 것이 필요할 수 있다. DIDC는 운전자가 운전의 재미를 추구할 때도 일어날 수 있다. 이러한 상황에 대해서는 운전의 재미와 관련된 정보를 제공함으로써 운전자의 만족도를 높일 수 있을 것이다.
DIAC는 운전자가 자동화 시스템에게 권한을 넘기는 것으로, 이러한 권한 이동은 운전자가 자신보다 자동화 시스템의 수행도가 높다고 생각할 때, 또는 운전자 자신의 편의를 추구할 때 일어난다. 운전자가 자신보다 자동화 시스템의 수행도가 높다고 생각할 때라는 것은 운전자가 졸음 등의 이유로 주의력이 부족하다고 판단하거나, 부차적인 작업 때문에 주의가 분산될 것이 우려되는 경우, 자동화 시스템이 더 나은 연비로 운전할 것으로 예상하는 경우 등이다. 시스템이 판단한 운전자의 상태와 수행도 수준을 보여주고 때로는 권한의 이양을 제안하는 인터페이스를 제공한다면 DIAC가 필요한지 아닌지에 대해 운전자가 더 잘 판단할 수 있도록 도울 수 있을 것이다. 또한, 운전자가 요청하였으나 자동화 시스템이 권한을 수용할 수 없는 상황이 발생할 수 있는데, 이에 대해 운전자가 그 원인과 결과를 명확하게 알 수 있게 하여 시스템에 대한 이해를 높이고 상황에 대한 제어를 유지할 수 있도록 하는 것이 중요하다. 이외에, 현재와 같이 정차 상황에서 ACC가 일시적으로 해제되었을 때 이를 재개하기 위한 버튼의 조작이나 LKAS 옵션 변경 등과 같이 버튼이나 스위치를 활용한 조작 방식이 아닌 운전자의 제어권 이양 의도를 보다 자연스럽게 전달할 수 있는 새로운 제어 방식이 도움이 될 수 있을 것이다. 운전자의 편의 추구에 대해서는, 이러한 요구사항을 최대한 만족시킬 수 있도록 자동주행 상황에서 최소한의 상황인식만을 요구하도록 하는 방안과 조작 장치와 관련하여 편의를 제공(예: 시트 및 스티어링휠 조정, 발 지지대 제공 등)하는 방안을 고려할 수 있다. 앞으로 발생할지 모를 AIDC 또는 DIDC 상황에 대비해 운전자가 상황인식을 유지하면서도 최대한의 편의를 누릴 수 있도록 하기 위해서는, 요구되는 적절한 상황인식의 수준에 대해 운전자에게 알려주거나, 주의가 필요한 대상에 대해 알려주는 인터페이스가 도움이 될 수 있다. 또한, 제어장치와 관련하여서도, 자동 운전 상황에서 손을 스티어링휠에서 뗀다거나 페달에서 발을 내려놓는 등의 편의를 고려하여, 언제 이러한 전환이 가능한지 또는 불가능한지 알려주거나, 전환의 용이성을 고려하여 조작장치의 설계를 개선하는 것이 필요할 수 있다.
AIDC는 자동화 시스템이 운전자에게 권한을 넘기는 상황이다. 이는 자동화 시스템이 판단하기에 시스템에 이상이 있거나 수행도가 떨어진다고 판단할 경우에 발생할 수 있다. 이와 관련해서는 자동화 시스템의 상태와 수행도에 대한 정보를 제공하고 도로 환경에 대해 운전자가 상황인식을 빠르게 회복할 수 있도록 도울 수 있는 디스플레이의 설계가 요구된다. 또한, 운전자가 권한을 수용할 수 없는 상황이 있을 수 있으므로, 이에 대한 시스템의 판단과 적절한 대응 전략이 필요할 것이다. AIDC는 시스템이 운전자의 낮은 상황인식 수준을 감지했을 때에도 발생할 수 있는데, 운전자의 상황인식 수준이 낮아 미래의 돌발상황에 운전자가 적절히 대처할 수 없을 것으로 예상되는 경우에 해당한다. 이와 관련하여 자동 주행 상황에서 운전자의 상황인식 수준을 모니터링하고 필요한 적정 상황인식 수준과 비교하여 경보를 제공하는 인터페이스가 도움이 될 수 있을 것이다.
AIAC는 자동화 시스템이 요청하여 운전자의 권한을 넘겨받는 상황으로, 시스템이 운전자의 이상 상태나 낮은 수행도를 감지하거나 예상하는 경우에 발생 가능하다. 판단된 운전자의 상태와 그러한 판단에 대한 확신 정도에 따라, 이러한 상황에서 시스템은 사용자의 허락을 요구하거나 그렇지 않을 수 있을 것이다. 어느 경우이든 운전자의 상태 및 수행도에 대한 정보 제공을 통해 시스템의 판단에 대한 근거를 제시할 필요가 있을 것이다. 또다른 AIAC의 상황은 미래의 군집 주행 등과 같이 교통 시스템의 효율을 위해 시스템이 운전자에게 특정 자동 주행 기능의 활성화를 요구하는 상황이다. 이러한 상황도 마찬가지로 시스템의 요구에 대해 운전자가 승인 여부를 판단하는 데 도움이 되는 정보를 제공할 필요가 있다.
자율주행의 등장과 함께 ADAS의 도입이 증가하면서, ADAS의 운전자 인터페이스에 대한 인간공학적 설계의 중요성이 점차 부각되고 있다. 본 연구에서는 ADAS 인터페이스에 대한 최근의 연구 결과들을 자동화 수준에 따른 영향과 디스플레이 및 제어장치에 대한 이슈로 구분하여 검토하였다. 다양한 시뮬레이션 환경의 특성과 조건의 차이로 인해 다양한 결과가 얻어지고 있다. 그러나, 일반적으로 ADAS에 의한 자동화가 고도화될수록 작업 부하가 감소하는 반면, 부차적 작업의 증가, 상황인식의 감소, 돌발 상황에 대한 반응시간 증가 등 부작용이 따르는 것으로 나타났다. 이를 최소화하기 위해서는 적절한 상황인식의 유지를 위한 디스플레이의 설계와, 상황에 대한 개입이 보다 효과적으로 이루어지도록 하는 제어장치의 설계가 필요하다. 디스플레이의 위치나 디스플레이가 제공하는 정보의 양식, 형태, 제공 시점 등에 대해 다양한 연구가 이루어져 온 반면, 조작장치에 대해서는 수동 모드 전환시 스티어링휠 조작에 대한 선호나, 스티어링휠에서 손을 뗄 수 있도록 허용되는 시간에 대한 연구 등 소수의 연구만이 수행되었다.
또한, 본 논문에서는 ADAS의 도입에 따라 특히 문제가 될 수 있는 운전자와 차량 간 제어권의 배분에 대하여, 기존의 모델들을 검토하고 권한의 이양을 유발하는 동기와 관련 인터페이스 설계 이슈를 분석하여 제시하였다. 분석 결과, 운전자와 차량의 수행도와 상황인식의 수준을 모니터링하고 효과적으로 제시함으로써 다양한 제어권 이양 상황에 도움을 줄 수 있을 것으로 기대된다. 따라서, 후속 연구를 통해 이러한 인터페이스를 제안하고 평가 실험을 통해 검증을 수행할 필요가 있다.
References
1. Albert, M., Lange, A., Schmidt, A., Wimmer, M. and Bengler, K., Automated driving - Assessment of interaction concepts under real driving conditions, Procedia Manufacturing, 3, 2832-2839, 2015.
Crossref
Google Scholar
2. Bashiri, B. and Mann, D.D., Automation and the situation awareness of drivers in agricultural semi-autonomous vehicles, Biosystems Engineering, 124, 8-15, 2014.
Crossref
Google Scholar
3. Biondi, F., Rossi, R., Gastaldi, M. and Mulatti, C., Beeping ADAS: Reflexive effect on drivers' behavior, Transportation Research Part F: Traffic Psychology and Behaviour, 25, 27-33, 2014.
Crossref
Google Scholar
4. Biondi, F., Strayer, D.L., Rossi, R., Gastaldi, M. and Mulatti, C., Advanced driver assistance systems: Using multimodal redundant warnings to enhance road safety, Applied Ergonomics, 58, 238-244, 2017.
Crossref
Google Scholar
5. Brookhuis, K.A., van Driel, C.J.G., Hof, T., van Arem, B. and Hoedemaeker, M., Driving with a congestion assistant: mental workload and acceptance, Applied Ergonomics, 40, 1019-25, 2008.
Crossref
Google Scholar
6. de Winter, J.C.F., Happee, R., Martens, M.H. and Stanton, N.A., Transportation Research Part F: Traffic Psychology and Behaviour, 27, 196-217, 2014.
Crossref
7. Damböck, D., Weissgerber, T., Kienle, M. and Bengler, K., ***Requirements for cooperative vehicle guidance***, Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), pp. 1656-1661, 2013.
Crossref
Google Scholar
8. Endsley, M.R. and Kaber, D.B., Level of automation effects on performance, situation awareness and workload in a dynamic control task, Ergonomics, 42, 462-492, 1999.
Crossref
Google Scholar
9. Gold, C., Dambock, D., Lorenz, L. and Bengler, K., "Take over!" How long does it take to get the driver back into the loop?", Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 57, 2013.
Crossref
Google Scholar
10. Inagaki, T., Design of human-machine interactions in light of domain-dependence of human-centered automation, Cognition, Technology & Work, 8, 161-167, 2006.
Crossref
Google Scholar
11. Kaber, D.B. and Endsley, M.R., Out of the loop performance problems and the use of intermediate levels of automation for improved control system functioning and safety, Process Safety Progress, 16, 126-131, 1997.
Crossref
Google Scholar
12. Kaber, D.B., Perry, C.M., Segall, N., McClernon, C.K. and Prinzel, L.J., Situation awareness implications of adaptive automation for information processing in an air traffic control-related task, International Journal of Industrial Ergonomics, 36, 447-462, 2006.
Crossref
Google Scholar
13. Kuehn, M., Hummel, T. and Bende, J., "Benefit Estimation of Advanced Driver Assistance Systems for Cars Derived from Real-Life Accidents", Proceedings of the 21st International Technical Conference on the Enhanced Safety of Vehicles, Stuttgart, Ger., 1-10, 2009.
Crossref
Google Scholar
14. Larsson, A.F.L., Kircher, K. and Hultgren, J.A., Learning from experience: Familiarity with ACC and responding to a cut-in situation in automated driving, Transportation Research Part F: Traffic Psychology and Behaviour, 27, 229-237, 2014.
Crossref
Google Scholar
15. Levitan, L., Golembiewski, G. and Bloomfield, J.R., Human factors issues for automated highway systems, ITS Journal, 21-47, 1998.
Crossref
Google Scholar
16. Lu, Z. and de Winter, J.C.F., A review and framework of control authority transitions in automated driving, Procedia Manufacturing, 3, 2510-2517, 2015.
Crossref
Google Scholar
17. Merat, N., Jamson, A.H., Lai, F.F.C.H., Daly, M. and Carsten, O.M.J., Transition to manual: Driver behaviour when resuming control from a highly automated vehicle, Transportation Research Part F: Traffic Psychology and Behaviour, 27, 274-282, 2014.
Crossref
Google Scholar
18. Merat, N., Jamson, H.A., Lai, F. and Carsten, O., Human factors of highly automated driving: Results from the EASY and CityMobil Projects. In Meyer G., Beiker S. (Eds), Road vehicle automation, Springer International, 113-125, 2014.
Crossref
Google Scholar
19. Naujoks, F., Mai, C. and Neukum, A., "The effect of urgency of take-over requests during highly automated driving under distraction conditions", Proceedings of the AHFE '14, 431-438, 2014.
Crossref
Google Scholar
20. Naujoks, F., Purucker, C., Neukum, A., Wolter, S. and Steiger, R., Controllability of Partially Automated Driving functions - Does it matter whether drivers are allowed to take their hands off the steering wheel?, Transportation Research Part F: Traffic Psychology and Behaviour, 35, 185-198, 2015.
Crossref
Google Scholar
21. NHTSA (National Highway Traffic Safety Administration), Federal Automated Vehicles Policy - Accelerating the Next Revolution in Roadway Safety. 2016.
Crossref
22. Nilsson, L., "Safety effects of Adaptive Cruise Control in critical traffic situations", Proceedings of the Second World Congress on Intelligent Transportation Systems: 'Step Forward', 3 (pp. 1254-9). Tokyo: VERTIS, 1995.
Crossref
Google Scholar
23. Nilsson, J., Strand, N., Falcone, P. and Vinter, J., "Driver performance in the presence of adaptive cruise control related failures: Implications for safety analysis and fault tolerance", Proceedings of the 43rd Annual IEEE/IFIP Conference on Dependable Systems and Networks Workshop, 1-10, 2013.
Crossref
Google Scholar
24. Parasuraman, R. and Riley, V., Humans and Automations: Use, Misuse, Disuse, Abuse, Human Factors, 39, 230-253, 1997.
Crossref
Google Scholar
25. Richards, D. and Stedmon, A., To delegate or not to delegate: A review of control frameworks for autonomous cars, Applied Ergonomics, 53, 383-388, 2016.
Crossref
Google Scholar
PubMed
26. Rudin-Brown, C.M. and Parker, H.A., Behavioural adaptation to adaptive cruise control (ACC): implications for preventive strategies. Transportation research part F: traffic psychology and behaviour, 7, 59-76, 2004.
Crossref
Google Scholar
27. Smith, B.W., SAE Levels of Driving Automation, http://cyberlaw.stanford.edu/blog/2013/12/sae-levels-driving-automation (retrieved September 1, 2017), 2013.
Crossref
28. SAE (Society of Automotive Engineers) International, On-Road Automated Driving (Orad) Committee J3016_201609 - Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles, 2016.
Crossref
29. Stanton, N.A. and Young, M.S., Driver behaviour with Adaptive Cruise Control. Ergonomics, 15(48), 1294-1313, 2005.
Crossref
Google Scholar
PubMed
30. Stanton, N.A., Young, M.S. and Walker, G.H., The Psychology of Driving Automation: A discussion with Prof. Don Norman. International Journal of Vehicle Design, 45, 289-306, 2007.
Crossref
Google Scholar
31. Stanton, N.A., Dunoyer, A. and Leatherland, A., Detection of new in-path targets by drivers using Stop & Go Adaptive Cruise Control, Applied Ergonomics, 42, 592-601, 2011.
Crossref
Google Scholar
PubMed
32. Strand, N., Nilsson, J., Karlsson, I.C.M. and Nilsson, L., Semi-automated versus highly automated driving in critical situations caused by automation failures, Transportation Research Part F: Traffic Psychology and Behaviour, 27, 218-228, 2014.
Crossref
Google Scholar
33. Treat, J.R., Tri-level Study of the Causes of Traffic Accidents, Institute for Research in Public Safety, Indiana University, 1979.
Crossref
Google Scholar
34. Young, M.S. and Stanton, N.A., Back to the future: Brake reaction times for manual and automated vehicles, Ergonomics, 50, 46-58, 2007.
Crossref
Google Scholar
PubMed
35. Zeeb, K., Buchner, A. and Schrauf, M., What determines the take-over time? An integrated model approach of driver take-over after automated driving, Accident Analysis & Prevention, 78, 212-221, 2015.
Crossref
Google Scholar
PIDS App ServiceClick here!