eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Jeongheon Song
, Yongchul Kim
10.5143/JESK.2017.36.6.621 Epub 2017 December 27
Abstract
Objective: The purpose of this research was to analyze the on-road driving performance of normal subjects for operating the foot operated steering devices in the virtual driving simulator.
Background: According to the statistical data of the survey on physical condition of persons with disabilities in 2014, about 60,000 people in South Korea have problems with upper limbs. These people have a lot of difficulties in daily life in use upper extremities, such as eating, dressing, writing, and moving objects. They also have problems in driving a car because they cannot grasp and control a conventional steering wheel. Therefore, if foot operated steering devices are used for controlling the motor vehicles on the road, the disabled persons can improve mobility life by driving a car safely.
Method: Twelve subjects were evaluated in this research to analyze on-road driving performance for operating different steering system by using three types of steering devices, e.g. conventional steering wheel, pedal type foot steering and circular type foot steering, in the virtual driving simulator. STISim Drive 3 software was used to test the on-road driving performance in the driving simulator. This research used One-Way ANOVA to analyze the influences of three different steering devices on the on-road driving performance.
Results: Tukey test results showed that there was a statistically significant difference between the conventional steering wheel and circular type foot steering system or pedal type steering system (p<0.01). However, there was no statistically significant difference (p>0.05) between the circular type steering system and the pedal type steering system. The ANOVA test results showed that there was not statistically significant (p>0.05) difference conventional steering wheel user group in the first half period (session 1~session 5) and circular type or the pedal type foot steering user group in the second half period (session 6~session 10).
Conclusion: The on-road driving performances with circular type and pedal type foot steering system in the second half period showed no significant statistical difference compared to conventional steering system in the first half period. In the case of using a foot operated steering system, the basic driving ability for acquiring a driver's license is secured through a certain level of practice if there is no problem with the lower limb function.
Application: This study can be used to evaluate the on-road driving performance and to improve their community mobility in people with upper limb disabilities by using foot operated steering system for adaptive vehicle.
Keywords
Foot steering system On-road test Virtual driving simulator
사람이 자유롭게 이동하지 못하면 사회적 참여와 활동의 제한을 경험하게 되어 사회생활을 영위하는데 커다란 어려움이 따르기 때문에 모든 사람에게 있어 이동은 기본적인 욕구이자 권리이며 삶의 기본요건을 보장하는 수단이다(Jung and Kim 2012). 자동차는 이러한 욕구를 해결하는데 현대사회에서 없어서는 안 될 중요한 도구이다. 운전면허 관리공단 통계자료에 따르면 2015년도 기준으로 30,293,621명이 운전면허를 보유하고 있으며(Road Traffic Authority, 2015), 전체 인구 중에서 운전면허 취득이 가능한 20세 이상 70세 미만은 36,592,670명이며(Statics Korea, 2015), 운전면허 취득 가능한 연령의 운전면허 보유율을 계산하면 82.8%가 된다. 장애인의 경우 2015년도 기준으로 142,697명이 운전면허를 보유하고 있으며(Road Traffic Authority, 2015), 전체 등록장애인(2,494,460명) 중에서 운전면허 취득이 가능한 20세 이상 70세 미만은 1,617,673명이며(Employment Development Institute, 2015), 장애인의 운전면허 취득 가능한 연령의 운전면허 보유율을 계산하면 8.8%로 비장애인(82.8%)의 약 10분의 1 수준에 해당하는 장애인이 운전면허를 보유하고 있는 실정이다.
또한, 2014년도 장애인 실태조사 통계자료(National Survey on Persons with Disabilities, 2014)에 의하면 우리나라의 경우 지체장애인과 뇌병변 장애인 중에서 약 6만여명이 상지의 양쪽 장애를 갖고 있는 것으로 나타났으며, 이는 등록된 언어장애인 전체의 약 50%에 해당하는 것으로 많은 사람들이 식사하기, 옷 입기, 글쓰기, 물건 움직이기, 세수하기 등과 같은 상지를 사용하는 일상생활에 많은 어려움을 갖게 된다. 특히, 양손을 이용한 자동차의 운전과 관련하여 일반적으로 기존의 조향 휠을 손으로 붙잡고 조작할 수 없기 때문에 기존의 차량을 안전하게 운전할 수 없게 된다. 이와 같은 경우는 손을 사용할 수 없기 때문에 왼쪽 발을 이용해서 조향을 제어하고, 오른쪽 발을 이용해서 가속 및 제동 페달을 조작할 수 있는 발로 조향하기 위한 족동 조향 시스템(Foot steering system)을 이용하여 운전이 가능하게 된다(Kope, 1958).
외국의 경우는 운전면허 시험에 통과하기 위하여 필요한 다양한 운전 능력 중에서 조향 능력은 운전 능력을 평가함에 있어서 가장 중요한 기능 중의 하나이기 때문에(Koppa, 1979), 양팔의 기능이 손상된 운전자가 왼쪽 발을 이용해서 조향이 가능하도록 다양한 편의를 제공해 주고 있다(Murphy, 1979; Haslegrave, 1985; Bouman and Pellerito, 2006; Directive 2006/126/EC, 2006; Hunter et al., 2009; Hegberg, 2012; Honda's Franz System, 2017; Murata et al., 2013). 1965년 독일의 Franz에 의해서 개발된 Franz system이 대표적이며, 이후 1977년 미국에 프란츠 시스템이 소개되고, 1981년 일본의 Honda를 통해서 프란츠 시스템이 일본에서 처음 소개되어, 족동 조향 차량을 이용한 운전면허 취득이 가능하도록 법이 개정되고, 1982년 Honda 차량을 족동 조향 시스템으로 개조하여 운전면허 취득자가 나오게 된다(Murphy, 1979; Honda's Franz System, 2017; Murata et al., 2013). 미국의 경우 1958년 David Kope에 의해 개발된 회전 원판형 형태의 조향 시스템이 대표적이며, 지금까지 양팔의 기능이 손상된 경우에 운전이 가능하도록 차량에 개조가 가능하다(Kope, 1958; Song and Kim, 2017).
족동 조향 시스템의 일반적인 구성 및 원리를 살펴보면, 발로 조작할 수 있는 입력 장치와 차량의 스티어링 휠을 회전시키기 위한 기어 및 체인 등으로 구성되어 있다. 입력 장치의 경우 자전거의 페달과 동일하게 동작하는 페달형 족동 조향 장치와 원판을 발로 동작하는 원판형 족동 조향 장치가 가장 많이 사용되고 있다. 페달형 족동 조향 장치의 경우 독일에서 처음으로 개발된 프란츠 시스템이 대표적이며, 페달은 기어 장치를 통해 차량의 조향 시스템에 연결되어 있으며 왼쪽 발을 이용해 정방향으로 페달링을 하면 차량이 우회전하고, 역방향으로 페달링을 하면 차량이 좌회전하도록 설계되어 있다. 자전거 페달을 동작하는 원리와 동일하기 때문에 가장 자연스러운 움직임을 사용할 수 있다는 장점이 있다. 원판형 족동 조향 시스템의 경우는 차량의 바닥 면에 차량의 조향 휠과 동일한 방향으로 회전하는 원판을 설치하고, 그 위에 발판을 만들어 발을 왼쪽으로 회전하면 차량이 좌회전하고, 발을 오른쪽으로 회전하면 차량이 우회전하도록 구성되어 있다. 실제 차량의 스티어링 휠의 움직임과 같은 방향으로 발을 이용해서 동작할 수 있다는 것이 특징이다. 이때 페달형 및 원판형 족동 조향 장치 모두 오른쪽 발을 이용해서 가속 및 제동 페달을 동작하게 된다. 또한 발을 이용해서 조향을 하는 경우는 차량의 다른 조작 장치들을 손을 이용해서 동작할 수가 없기 때문에 무릎, 어깨 또는 머리에 의해서 조작될 수 있는 장치를 사용하게 된다(Murphy, 1979; Haslegrave, 1985).
우리나라의 경우 2001년도에 족동 조향 장치가 설치된 차량을 이용한 운전면허 취득이 허용되고, 이후 족동 조향 장치를 적용한 차량을 이용하여 국내에서 최초로 운전면허를 취득하게 된다. 송파 구청의 경우는 2002년부터 장애인용 족동 조향 차량을 도입하여 운전면허 훈련을 진행해 오고 있으며, 또한 국립재활원의 경우는 2011년부터 족동 조향 차량을 제작하여 운전면허 훈련을 지원해 오고 있다.
하지만, 안전 운전과 관련된 도로교통법 48조 1항에(Road Traffic Act, Article 48, 2015) 의하면 모든 차의 운전자는 조향 장치와 제동 장치, 그 밖의 장치를 정확하게 조작해야 하기 때문에, 초보 운전자들이 익혀야 하는 가장 중요한 기술은 속도를 제어하고, 조향을 하고, 원하는 차로를 견지하는 것과 같이 차량을 물리적으로 통제하는 기술이다(Do et al., 2013). 하지만, 장애인을 위한 족동 조향 장치에 대한 객관적인 운전 성능 평가와 관련된 연구가 그 동안 거의 없었기 때문에 장애인이 비장애인과 같이 안전하게 운전하기 위해서는 족동 조향 장치에 따른 운전 성능에 대한 비교 연구가 필요한 실정이다(Murata et al., 2013; Kim and Rhee, 2010).
따라서, 본 연구에서는 운전 시뮬레이터에서 왼쪽 발을 이용해 스티어링 휠을 동작하는데 사용되는 족동 조향 장치의 두 가지 종류(페달형과 원판형 족동 조향 장치)에 따른 도로 주행 성능을 분석하기 위하여 비장애인을 대상으로 총 12명에 대해 도로 주행 평가를 수행하였다.
2.1 Subjects
기존의 스티어링 휠(Conventional steering wheel)과 페달형 및 원판형 족동 조향 장치(pedal type foot steering, circular type foot steering)의 도로 주행 성능을 평가하기 위하여 운전 경험에 따라 운전 능력에 차이가 발생할 수 있기 때문에 운전면허를 취득한지 1년 이상 경과한 남녀 대상자 12명을 선발하여 3개의 그룹(기존의 스티어링 휠 사용자 그룹, 페달형 족동 조향 장치 사용자 그룹, 페달형 족동 조향 장치 사용자 그룹)으로 나누어 가상 운전 시뮬레이터에서 실험을 진행하였다. 피험자의 평균 연령은 25.7세이며, 운전 경력은 평균 4.4년으로, 실험에 참가한 대상자의 특성은 Table 1과 같다.
|
Subjects |
Gender |
Age (years) |
Driving license |
|
|
Conventional steering wheel |
A |
F |
23 |
O |
|
B |
F |
25 |
O |
|
|
C |
M |
24 |
O |
|
|
D |
M |
26 |
O |
|
|
Circular type foot steering |
E |
M |
26 |
O |
|
F |
M |
26 |
O |
|
|
G |
F |
22 |
O |
|
|
H |
F |
25 |
O |
|
|
Pedal type foot steering |
I |
F |
22 |
O |
|
J |
F |
27 |
O |
|
|
K |
M |
26 |
O |
|
|
L |
M |
24 |
O |
|
기존의 스티어링 휠 사용자 그룹의 경우 조향 휠과 페달을 사용하는 데는 문제가 없었으며, 족동 조향 장치를 사용하는 그룹의 경우 족동 조향 시스템을 처음 사용하기 때문에 착용 방법 및 동작 방법을 설명하였으며, 왼쪽 발에 족동 조향 시스템 조작 장치를 장착하고, 오른쪽 발을 가속 및 제동 페달에 올려놓은 상태로 피험자가 가장 편안한 자세로 동작할 수 있도록 자세를 조정하였다. 피험자 모두 실험을 진행하기 전에 실험과 관련하여 내용 및 도로 주행 환경에 대해서 충분한 설명을 들었으며, 대상자의 동의를 모두 받은 후 실험을 진행하였다.
2.2 Experimental setup
2.2.1 Virtual driving simulator
페달형 및 원판형 족동 조향 시스템을 실제 차량에 직접 적용하여 평가하는 것은 많은 비용이 들며, 안전상의 문제가 발생할 수도 있기 때문에 가상 운전 시뮬레이터를 제작하여 모의 환경에서 도로 주행 능력을 평가할 수 있는 시스템을 구축하였다(Kim and Kim, 2012; Jung and Kim, 2012). 운전 주행 프로그램으로는 STISIM Drive (System Technology Inc., USA)를 설치하였고, 디스플레이 출력 장치로는 47인치 TV를 설치하여 운전자의 시야 각을 넓혀 현장감을 높여주었다(Figure 1).

2.2.2 Foot operated steering system
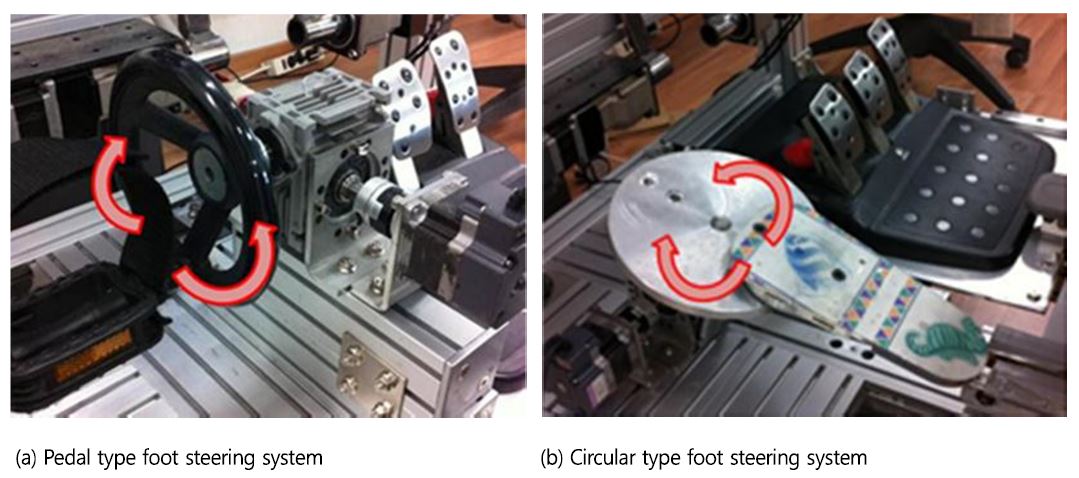
가장 많이 사용되는 족동 조향 장치는 크게 두 가지 종류로, 첫번째는 자전거 페달 형태(Pedal type)로 왼쪽 발을 이용해서 정방향으로 페달링을 하면 차량이 우회전하고, 역방향으로 페달링을 하면 차량이 좌회전하도록 구성되어 있다(Figure 2(a)), 두번째는 원판 형태(Circle type)로 차량의 바닥 면에 차량의 조향 휠과 동일한 방향으로 회전하는 원판을 설치하고, 그 위에 발판을 만들어 발을 왼쪽으로 돌리면 차량이 좌회전하고, 발을 오른쪽으로 돌리면 차량이 우회전하도록 구성되어 있다(Figure 2(b)). 실제 차량에 설치하는 경우는 운전자에게 맞는 신발이 고정되어 있으며, 본 실험에서는 다양한 대상자들에 대한 실험을 진행하기 위하여 스트랩으로 발을 고정하였다. 두 장치 모두 기계식으로 연결되어 장치를 사용함에 있어 두 손으로 핸들을 회전시키는 힘과 동일하게 발로 작동을 해야 한다. 기계식으로 족동 조향 시스템을 적용하기 위해서는 차량마다 차량 내부의 공간 유형이 다르고 운전석의 바닥과 차축의 높이 등이 다르기 때문에 설치 및 대상자에게 적용하는데 시간과 비용이 많이 들고, 차량의 전장 시스템의 발전으로 더 이상 기계적인 구조변경으로 인한 족동 조향 시스템의 적용이 어렵다(Song and Kim, 2017).
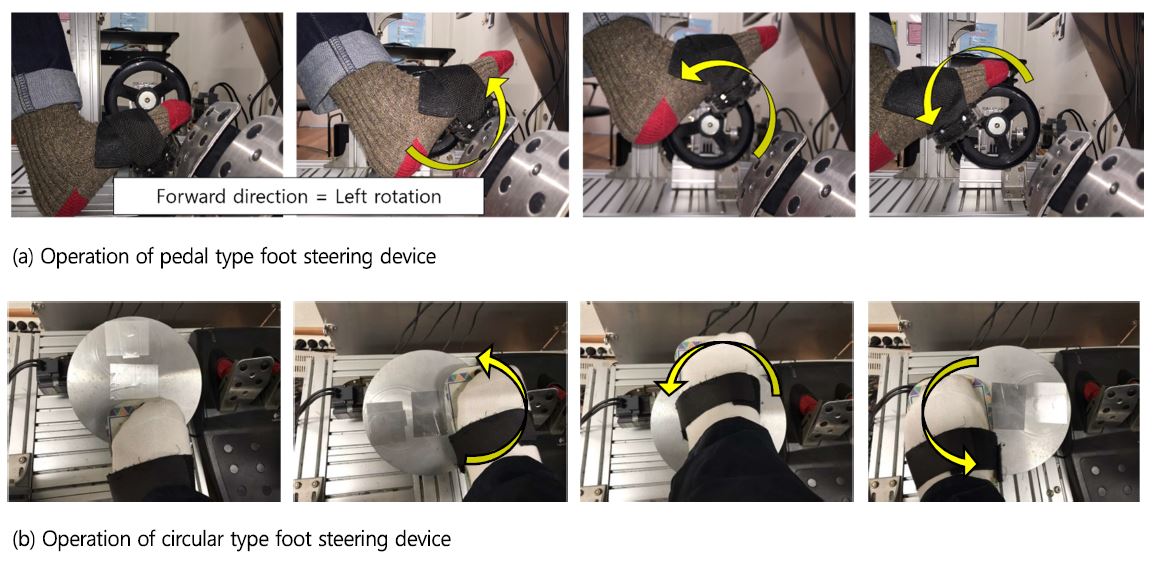
따라서, 본 연구에서 개발한 페달형 및 원판형 족동 조향 시스템은 회전축에서 측정한 엔코더 데이터를 PC로 전달하여 스티어링 휠에 기어 장치로 연결된 모터를 제어할 수 있는 전자식 제어 시스템으로 구성되어 있다. 전자식 족동 조향 시스템은 왼발로 페달이나 원판을 동작할 때 회전축에서 측정된 회전각 데이터를 바탕으로 모터를 제어할 수 있는 제어알고리즘, 그리고 PC에서 모터를 움직이게 할 수 있는 모션 보드와 모터로 구성되어 있다. 스티어링 휠을 제어할 수 있도록 Ez-servo 모터와 모터 드라이버(FASTECH Co., Ltd)를 사용하였다. 또한 모터를 제어하기 위한 소프트웨어는 내쇼날 인스트루먼트(National Instruments Co.)사의 Labview 2016 프로그램과 모터와 PC를 연결하여 주는 모션 카드를 시뮬레이터용 PC에 설치하였다(Jung and Kim, 2012). 페달 형태의 족동 조향 장치의 경우 정방향으로 페달링을 하면 차량이 우회전하고, 역방향으로 페달링을 하면 차량이 좌회전하게 된다. 회전 비율은 기어의 비율에 따라 달라지지만, 1:1 비율로 작동하도록 설계하였다(Figure 3). 원판 형태의 족동 조향 장치의 경우 차량의 핸들과 동일한 방향으로 차량이 회전을 하며, 회전 비율도 1:1로 설계하였다(Song and Kim, 2017).
2.3 Test scenarios for on road evaluation
기존의 스티어링 휠과 페달형 및 원판형 족동 조향 장치의 도로 주행 성능을 평가하기 위한 도로의 구성을 위하여, 도로 주행 코스는 도로교통법 시행 규칙의 별표 24 '도로 주행 시험을 실시하기 위한 도로의 기준을 참고하였고 실제로 경산시의 H 자동차 운전 전문 학원에서 실시하고 있는 도로를 STISIM으로 제작하여 평가하였다(Jung and Kim, 2012). 코스의 총 길이는 약 6Km이며 교차로는 17개, 그 중 신호등이 있는 곳은 5곳이다. 좌회전 2회, 우회전 2회를 실시하게 되어 있다(Figure 4).

2.4 Experimental procedure
본 연구에서 개발된 족동 조향 장치는 현재의 운전 능력과는 다른 신체적인 능력이 필요하기 때문에 적응을 위한 훈련 및 연습 기간이 필요하다. 적응 기간 또한 마찬가지로 개인의 차이가 있음을 고려해야 한다. 실험은 12일간 실시하며 1일 2회로 지정된 코스를 완주하는 것으로 한다. 모든 도로 주행 과정은 사용 소프트웨어인 STISim 3에 의해 자동 저장되며 다시 보기 기능으로 재확인 할 수 있어 평가 시에 신뢰성을 높였다. 실험 시 운전의 조작은 개발된 장비를 사용하여 한발은 핸들을 회전시키고 다른 한발은 엑셀과 브레이크를 조작할 수 있도록 하였다. 먼저 4일 동안 기존의 스티어링 휠을 사용한 그룹에 대한 실험을 실시하고, 다음으로 원판형 족동 조향 장치와 페달형 족동 조향을 사용하는 그룹에 대한 실험을 실시하였다. 실험 시작 전 가상 운전 시뮬레이터 적응을 위해 15분 연습 시간을 주고 실험을 시작하였다. 연습용 맵과 실험용 맵을 구분하여 실시하였으며, 실험 시작 전 운전석에 앉아 조작하기 편한 자세를 맞춰주고, 불편 여부를 확인하여 최적의 환경 상태로 운전이 가능하도록 하였다.
2.5 Data analysis
남녀 12명의 운전면허 소지자를 대상으로 기존의 스티어링 휠을 사용하는 그룹, 원판형 족동 조향 장치를 사용하는 그룹과 페달형 족동 조향 장치를 사용하는 그룹에 대한 도로 주행 능력을 평가하기 위하여 Minitab 15 통계 프로그램을 이용하여 통계 분석을 수행하였다. 3개의 그룹 간의 전체적인 운전 성능 특성을 비교하기 위하여 One-way ANOVA 방법을 사용하였다. p 값이 0.05 미만인 경우에 통계학적인 유의성이 있는 것으로 정의하였다. 또한 분산 분석에서 기존의 스티어링 휠 사용자 그룹, 원판형 족동 조향 장치 사용자 그룹과 페달형 족동 조향 장치 사용자 그룹 간의 유의성이 나타나는 경우 사후 검정 방법인 Tukey test 방법을 이용하여 3개의 그룹 상호 간의 통계학적인 유의성 검증을 수행하였다(Jung and Kim, 2012).
3.1 Analysis of driving patterns in three different groups
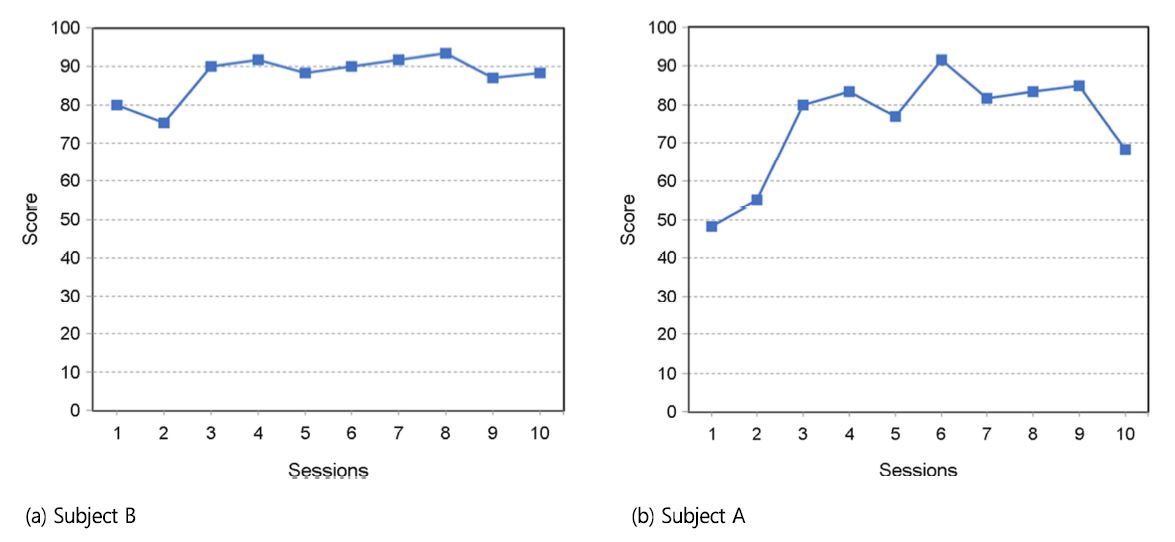
3가지 조향 장치에 의한 운전 성능을 분석하기 위하여 가상 운전 시뮬레이터에 H 자동차 운전 전문 학원에서 실시하고 있는 도로를 STISIM 프로그램으로 제작하여 도로 주행 채점표를 기준으로 평가를 진행하였다. 도로 주행 시험 채점결과 기존의 조향 휠과 페달을 사용하는 그룹의 실험자 4명 중 3명(B, C, D)의 경우 Figure 5(a)와 같이 모두 처음부터 70점 이상의 합격 점수에 들어오는 경향을 보였다. 또한 실험자 A의 경우 Figure 5(b)와 같이 3회차 이후부터 70점 이상의 합격 점수에 도달하는 경향을 보였다. 이는 가상 운전 시뮬레이터에서의 적응 시간이 필요했던 것으로 보이며 3회차 이후에는 다른 3명과 유사한 패턴을 보였다.
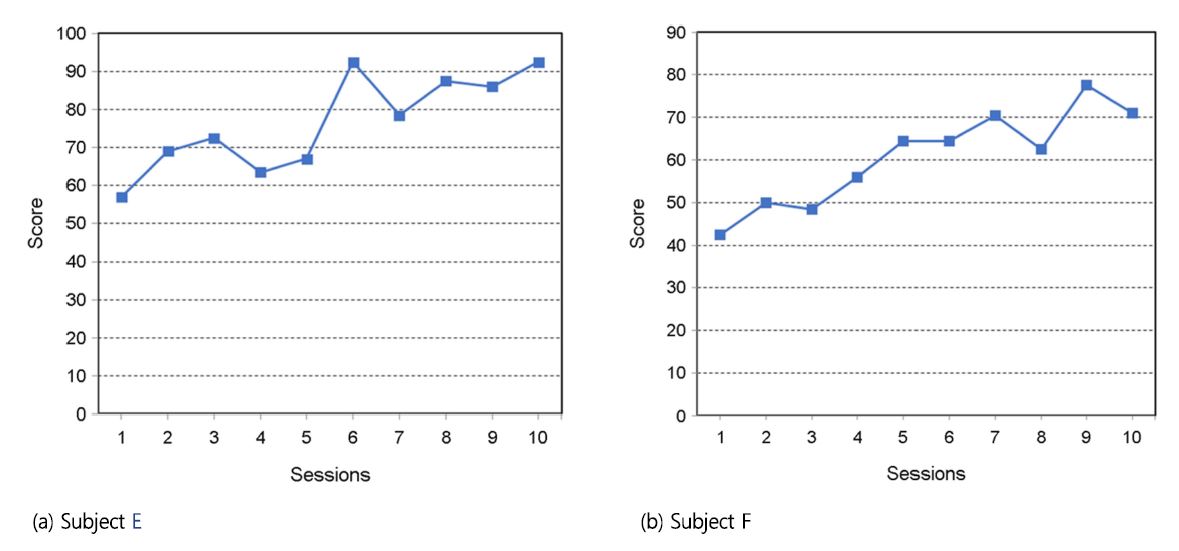
원판형 족동 조향 장치 사용자 그룹의 실험자 4명 중 2명(E, H)의 경우 Figure 6(a)와 같이 처음 적응 기간을 거친 후 5회, 6회차에 70점 이상의 합격 점수에 도달하는 경향을 보였다. 또한 다른 2명(F, G)의 경우 Figure 6(b)와 같이 나타났으며 후반부 9회차 이후에 70점 이상의 합격 점수에 도달하기 시작하였다. 운전면허증을 보유하고 있지만 원판형 족동 조향 장치를 처음 사용해 보기 때문에 합격 점수에 도달하는 시간이 5~6회 차로 기존의 조향 휠을 사용하는 것보다 늦어지는 것으로 나타났다.
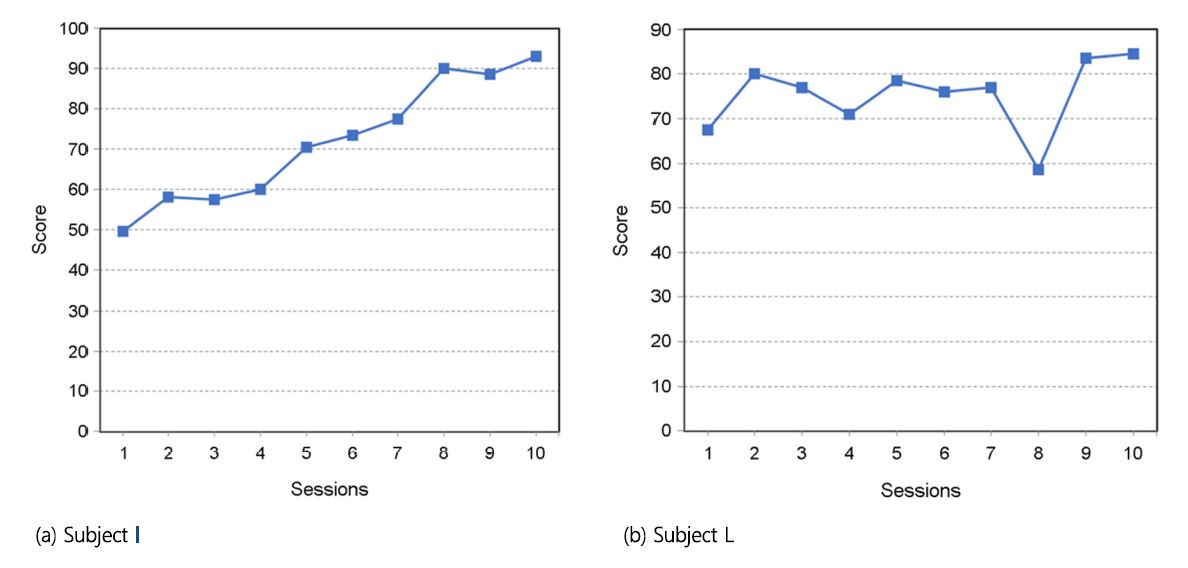
페달형 족동 조향 장치 사용자 그룹의 실험자 4명 중 3명(I, J, K)의 경우 Figure 7(a)와 같이 처음 적응 기간을 거친 후 5회, 6회, 7회차에 70점 이상의 합격 점수에 도달하는 경향을 보였다. 또한 다른 1명(L)의 경우 Figure 7(b)와 같이 초반부 2회차부터 70점 이상의 합격 점수에 도달하기 시작하였다. 원판형 족동 조향 장치를 사용하는 그룹과 마찬가지로 운전면허증을 보유하고 있지만 페달형 족동 조향 장치를 처음 사용해 보기 때문에 합격 점수에 도달하는 시간이 5~7회 차로 기존의 조향 휠을 사용하는 것보다 합격 점수에 도달하는 시간이 더 필요한 것으로 나타났다.
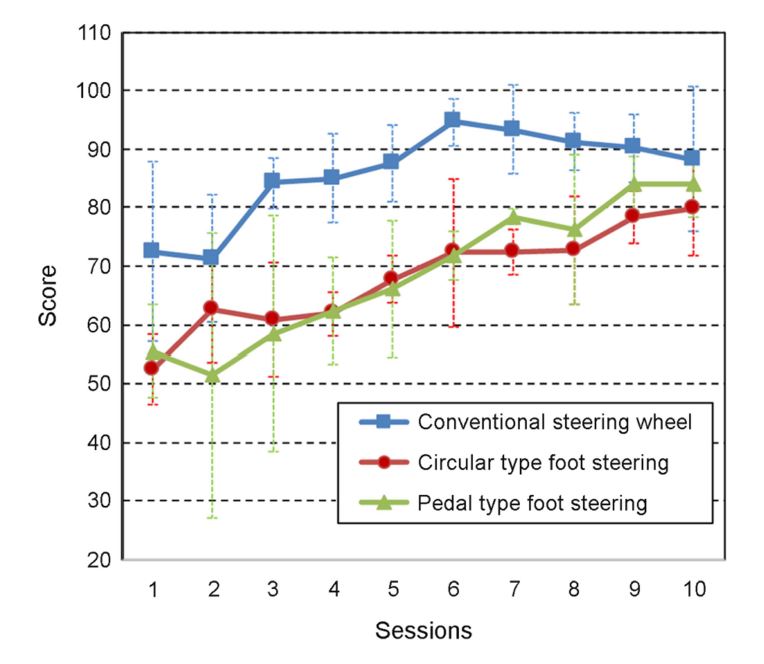
3.2 Characteristics of driving performance during test sessions
3가지 조향 장치(기존의 스티어링 휠, 원판형 족동 조향 장치, 페달형 족동 조향 장치)에 대한 회차 별 평균 도로 주행 점수를 비교해 보면, 기존의 스티어링 휠을 사용하는 그룹은 평균 점수를 기준으로 1회차부터 70점 이상의 도로 주행 합격 점수에 도달했으며 6회차 이후 90점대 이상의 안정된 상태를 유지하는 것으로 나타났다(Figure 8). 원판형 족동 조향 장치 사용자 그룹은 도로 주행 평균 점수가 6회차 이후에 70점 이상의 도로 주행 합격 점수에 도달하는 것으로 나타났다(Figure 8). 페달형 족동 조향 장치 사용자 그룹은 원판형 족동 조향 장치 사용자 그룹과 유사하게 6회차 이후에 70점 이상의 도로 주행 합격 점수에 도달하였으며, 9회차에 80점대에 도달하는 것으로 나타났다(Figure 8). 하지만 페달형 족동 조향 장치를 사용하는 대상자의 경우 초기부터 5회차까지의 도로 주행 평균 점수는 원판형 족동 조향 장치를 사용자 보다 낮은 것으로 나타났다.
3.3 Comparison of driving performance in three different groups
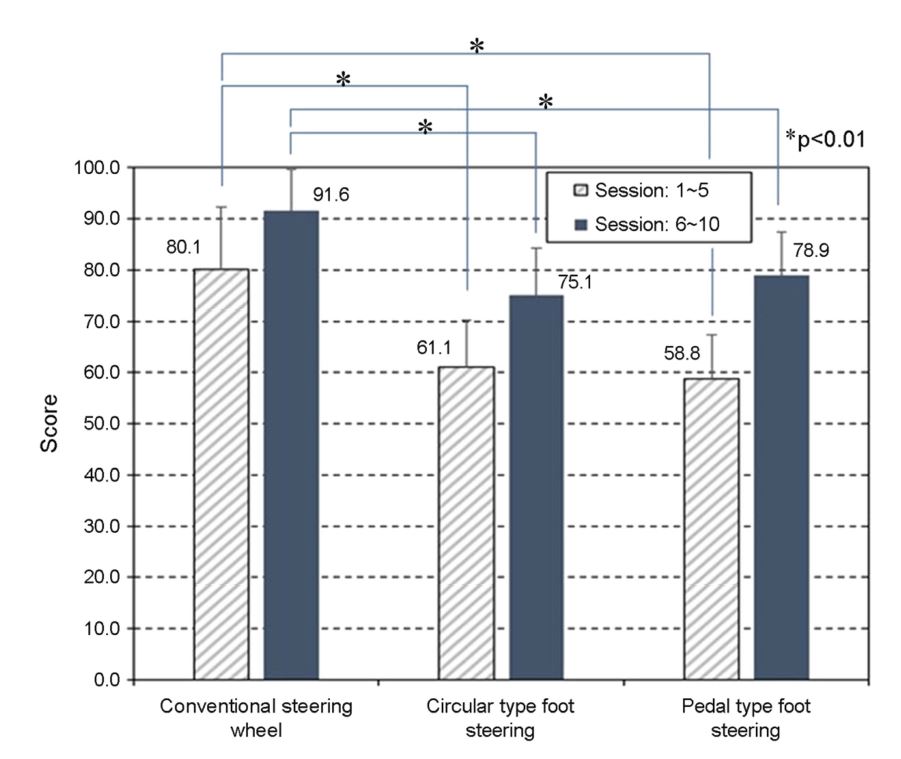
3가지 조향 장치 사용자 그룹의 전체 주행 점수를 합격 점수에 도달하기 시작하는 시점을 기준으로 전반기 구간(1~5회)과 후반기 구간(6~10회)으로 나누어 도로 주행 점수에 대한 평균과 표준편차를 비교한 그래프를 Figure 9에 나타냈다. One-way ANOVA 분석을 통해서 3개 그룹에서의 전반기 및 후반기 구간에서의 평균값 차이를 분석한 결과 기존의 스티어링 휠 사용자 그룹, 원판형 족동 조향 장치 사용자 그룹, 페달형 족동 조향 장치 사용자 그룹 사이에 통계학적으로 유의하게(p<0.01) 차이가 발생하는 것으로 나타났다. 또한 Tukey test 사후 검정 방법을 이용해서 3개의 그룹들 간의 상호 관계를 분석한 결과 기존의 스티어링 휠 사용자 그룹과 원판형 족동 조향 장치 및 페달형 족동 조향 장치 사용자 그룹 사이에 통계학적으로 유의한 차이가 있는 것으로 나타났다(p<0.01). 하지만 원판형 족동 조향 장치 사용자 그룹과 페달형 족동 조향 장치 사용자 그룹 사이에는 통계학적으로 유의한 차이가 나타나지 않았다(p>0.05). 하지만 전반기 구간에서는 원판형 족동 조향 장치가 페달형 족동 조향 장치보다 도로 주행 점수가 평균 약 3.9% 증가하는 것으로 나타났으며, 후반기 구간에서는 페달형 족동 조향 장치가 원판형 족동 조향 장치보다 도로 주행 점수가 평균 약 5.1% 증가하는 것으로 나타났다. 또한, 기존의 스티어링 휠 사용자 그룹의 전반기 구간(1~5회)에서의 도로 주행 점수의 평균값과 원판형 족동 조향 장치 및 페달형 족동 조향 장치 사용자 그룹의 후반기 구간(6~10회)에서의 도로 주행 점수의 평균값을 비교해 보면 통계학적으로 유의한 차이가 없는 것으로 나타났다(p>0.05). 따라서, 원판형 족동 조향 장치와 페달형 족동 조향 장치의 경우 운전면허증을 가지고 있기는 하지만 처음 사용해 보는 장치이기 때문에 충분한 훈련 시간이 주어진다면, 기존의 스티어링 휠과 같이 도로 주행 합격 점수인 70점 이상의 안정적인 성능을 보이는 것으로 나타났다.
상지 장애인을 위한 족동 조향 시스템의 2가지 형태인 원판형과 페달형 족동 조향 장치에 대하여 가상 운전 시뮬레이터 환경에서 도로 주행 성능을 평가하였다. 도로 주행 성능을 분석하기 위하여 기존의 스티어링 휠 사용자 그룹 4명, 원판형 족동 조향 장치 사용자 그룹 4명, 페달형 족동 조향 장치 사용자 그룹 4명에 대하여 비교 실험을 수행하였다. 모두 운전면허증을 보유한 12명이 실험에 참여하였으며, 각각 동일한 코스를 10회씩 주행하였다. 그리고 3가지 장치에 대한 사용자 그룹의 도로 주행 평가를 통하여 다음과 같은 결론을 얻을 수 있었다.
첫째, 기존의 스티어링 휠을 사용하는 그룹은 도로 주행에 대한 평균 점수를 기준으로 1회차부터 70점 이상의 도로 주행 합격 점수에 도달했으며 6회차 이후 90점대 이상의 안정된 상태를 유지하는 것으로 나타났다. 일반적으로 운전면허증을 보유한 대상자의 경우는 도로 주행에 필요한 기본적인 가속 및 제동 페달 조작 능력과 조향 장치 조작 능력을 가지고 있기 때문에 기존의 스티어링 휠이 장착된 가상 운전 시뮬레이터에서 1회차부터 도로 주행 합격 점수에 도달하는 것으로 나타났다. 하지만, 원판형 족동 조향 장치 및 페달형 족동 조향 장치 사용자 그룹은 손을 사용하는 대신 발을 이용하여 조향을 하기 때문에 처음 사용하는 장치에 대한 적응 기간을 필요로 하기 때문에 두 가지 형태의 족동 조향 장치 모두 평균적으로 도로 주행 점수가 6회차 이후에 70점 이상의 도로 주행 합격 점수에 도달하는 것으로 나타났다.
둘째, 사후 검정 결과 기존의 스티어링 휠 사용자 그룹과 원판형 족동 조향 장치 및 페달형 족동 조향 장치 사용자 그룹 사이에 통계학적으로 유의한 차이가 있는 것으로 나타났다(p<0.01). 하지만 원판형 족동 조향 장치 사용자 그룹과 페달형 족동 조향 장치 사용자 그룹 사이에는 통계학적으로 유의한 차이가 나타나지 않았으며(p>0.05), 두 가지 형태의 족동 조향 장치 모두 도로 주행 성능 평가에서 유사한 운전 성능을 보이는 것으로 확인되었다. 하지만 전반기 구간에서는 원판형 족동 조향 장치가 페달형 족동 조향 장치보다 통계학적으로 유의하지는 않지만 도로 주행 점수가 평균 3.9% 증가하는 것으로 나타났으며, 후반기 구간에서는 페달형 족동 조향 장치가 원판형 족동 조향 장치보다 통계학적으로 유의하지 않지만 도로 주행 점수가 평균 5.1% 증가하는 것으로 나타났다. 따라서, 원판형 족동 조향 장치의 경우 처음 사용하는데 페달형 족동 조향 장치보다 적응이 빠르지만, 어느정도 훈련이 진행된다면 페달형 족동 조향 장치가 조금 향상되는 것으로 생각된다.
셋째, 기존의 스티어링 휠 사용자 그룹의 전반기 구간(1~5회)에서의 도로 주행 점수의 평균값과 원판형 족동 조향 장치 및 페달형 족동 조향 장치 사용자 그룹의 후반기 구간(6~10회)에서의 도로 주행 점수의 평균값을 One-way ANOVA 분석을 이용해서 비교해 보면 통계학적으로 유의한 차이가 없는 것으로 나타났다(p>0.05). 따라서, 원판형 족동 조향 장치와 페달형 족동 조향 장치의 경우 처음 사용해 보는 장치이기 때문에 충분한 훈련 시간이 주어진다면, 기존의 스티어링 휠과 같이 도로 주행 합격 점수인 70점 이상의 안정적인 성능을 보이는 것으로 나타났다. 따라서, 족동 조향 장치를 사용하는 경우에 하지 기능에 문제가 없다면 일정한 수준의 연습을 통하여 운전면허 취득을 위한 기본적인 운전 능력이 확보되는 것으로 나타났다. 본 연구에서는 가상 운전 시뮬레이터 상에서 실제 차량의 관성에 의한 영향이 없는 상태에서의 도로 주행 특성을 분석한 것으로, 향후 실제 차량의 관성에 의한 쏠림이 발생하는 부분에 대한 연구가 추후 필요할 것으로 생각된다.
References
1. Bouman, J. and Pellerito, J.M., Preparing for the on-road evaluation. In Pellerito, J.M. (ED.), Driving Rehabilitation and community Mobility: Principes and Practices. St. Louis, MO, Elseier Mosby, 2006.
Crossref
Google Scholar
2. Directive 2006/126/EC of the European Parliament and of the Council on Driving Licences, Official Journal of the European Union, 2006.
Crossref
3. Do, C.U., Kim, H.S., Kim, K.W., Lee, S.B. and Cho, H.J., Traffic Safety Engineering, Cheong Moon Gak Publisher, Seoul, 2013.
Crossref
4. Employment Development Institute, Survey on the employment status of the disabled in business, 2015, http://edi.kead.or.kr
Crossref
5. Haslegrave, C.M., Car controls for physically handicapped drivers, International Technical Conference on Automobiles for the Physically Disabled, p. 235-242, 1985.
Crossref
Google Scholar
6. Hegberg, A., Use of adaptive equipment to compensate for impairments in motor performance skills and client factors. In McGuire, M.J., Davis, Schold Davis, E., editors: Driving and community mobility: occupational therapy strategies across the lifespan, Bethesda, MD, AOTA Publishing, p. 279-319, 2012.
Crossref
7. Honda's Franz System; http://world.honda.com/history/challenge/09_peopleandsociety/, 2017.
Crossref
8. Hunter, J.A.A., Vries, J., Brown, Y., Hartmann, J.B., Hekstra, A. and Vidmar, G., Handbook of Disabled Driver Assessment, Forum of Mobility Centres, 2009.
Crossref
9. Jung, W. and Kim, Y., Development of smart driving system using iPod and its performance evaluation for people with severe physical disabilities in the driving simulator, Journal of the Ergonomics Society of Korea, 31(5), 637-646, 2012.
Crossref
Google Scholar
10. Kim, D.O. and Rhee, K.M., A comparative study by types of foot steering devices through driver testing courses and the survey study on the modification status of foot steering devices for persons with upper extremity disabilities, Journal of Rehabilitation Research, vol. 14, no. 1, pp. 83-111, 2010.
Crossref
11. Kim, Y. and Kim, Y., Driving performance evaluation using bio-signals from the prefrontal lobe in the driving simulator, Journal of the Ergonomics Society of Korea, 31(2), 319-325, 2012.
Crossref
Google Scholar
12. Kope, D., Vehicle steering device, U.S. Patent, 2,865,223, 1958.
Crossref
Google Scholar
13. Koppa, R.J., Adaptive control requirements for the quadriparetic driver, Doctoral Dissertation, Department of Industrial Engineering, Texas A&M University, College Station, Texas, 1979.
Crossref
14. Murata, Y., Yoshida, K., Suzuki, K. and Takahashi, D., Proposal of an automobile driving interface using gesture operation for disabled people, The Sixth International Conference on Advances in Computer-Human Interactions, pp. 472-476, 2013.
Crossref
Google Scholar
15. Murphy, E.F., Reflections on automotive adaptive equipment-an essay, Bulletin of Prosthetics Research, vol. 16, no. 2, pp. 191-207, 1979.
Crossref
Google Scholar
16. National Survey on Persons with Disabilities 2014, Korea Institute for Health and Social Affairs, 2014.
Crossref
17. Road Traffic Act, Article 48, 2015, http://law.go.kr.
Crossref
18. Road Traffic Authority, driver's License Examination Office, 2015, http://dl.koroad.or.kr
Crossref
19. Song, J. and Kim, Y., Driving Performance Evaluation Using Foot Operated Steering System in the Virtual Driving Simulator, Journal of Biomedical Engineering Research, vol 38, no. 4, pp. 197-204, 2017.
Crossref
20. Statics Korea, Survey of census population, 2015, http://www.kostat.go.kr
Crossref
PIDS App ServiceClick here!