eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
eISSN: 2093-8462 http://jesk.or.kr
Open Access, Peer-reviewed
Jae Kyeong Choi
, Jae Hee Park
10.5143/JESK.2023.42.4.305 Epub 2023 August 30
Abstract
Objective: The purpose of this study is to analyze the lifting work posture and the load on the lumbar spine in a low-roof delivery vehicle in which couriers must bend their neck and waist when handling packages.
Background: Due to COVID-19, the volume of parcel deliveries has increased significantly recently, and for safety reasons, some apartment complexes prohibit ground parking of delivery vehicles and instead require them to perform delivery tasks in underground parking lots. At this time, ordinary delivery vehicles with high garages cannot enter the underground parking lot, so there is no choice but to use low-roof delivery vehicles. In low-roof delivery vehicles, uncomfortable postures on the back and neck of couriers are inevitable when loading and unloading parcel items, which makes work uncomfortable and increases the possibility of musculoskeletal diseases.
Method: In this study, we conducted experiments by setting the ceiling height of the delivery vehicle at three stages: 1,300, 1,600, and 1,900mm. Six men aged 20~30 who participated in the experiment were asked to lift and put down a square box weighing 15kg twice under each ceiling height. A three-dimensional motion analysis device was used to track 24 markers attached to the joints of the subjects, and then the flexion angle of the waist and the flexion angle of the neck were measured. In addition, the angle of each joint was used in the 3DSSP program to calculate the compression force at L5/S1.
Results: The results of the one-way ANOVA show a significant difference in compression force and waist flexion angle at L5/S1 with the ceiling height of delivery vehicle (p<0.001). However, there was no significant difference in the angle of flexion of the neck (p=0.736).
Conclusion: The lifting work at a height of 1,300mm in delivery vehicles showed that the compression force at the average L5/S1 based on 3DSSPP exceeded the standard value of 3,400N. In view of this, parcel delivery using low-roof delivery vehicles, which is currently a social problem, should be avoided.
Application: The results of this study can be used as basic data for designing the ceiling height of delivery vehicles and may be utilized in the establishment of relevant laws and policies.
Keywords
Low-roof delivery vehicles 3D motion analysis Workplace height Musculoskeletal disorders
2019년부터 시작된 코로나19 바이러스는 빠른 속도로 전파되어 전 세계의 팬데믹(pandemic) 상황까지 만들었으며, 이로 인해 비대면 사회활동이 크게 늘어났다. 코로나19 확산으로 인한 가장 큰 변화는 소비 산업이 온라인 주문 형태로 가장 많이 바뀌었고, 이에 따라 크게 성장한 산업은 운수업과 택배산업이라고 할 수 있다(Ministry of Land, 2020).
비대면 사회활동의 장기화에 따라 택배는 일상화된 서비스로 변화하였고 '20년 2월 택배 물동량은 31.7%로 급격하게 증가하였고 이후 6월의 택배 물동량은 다시 급증하여 전년 같은 달 대비 37% 상승을 기록하였다(Seo et al., 2021). 소매 업태 별 판매액 지수 증가율을 보면 무점포 소매는 2020년에 전년 대비 24.6% 증가하였고, 무점포 소매업 중 인터넷 쇼핑은 2018년 20.5%, 2019년 19.1%, 2020년 33.2% 증가하였다고 하였다. 또한, 택배 물량이 증가함에 따라 택배기사도 증가하였고, 산업 성장세도 더욱 가속화되었다(Kim and Hwang, 2021). 국내 택배산업은 인터넷 전자상거래의 영향으로 2000년대 이후 물동량 기준 약 30.6배 성장하였고, 최근에는 온라인 전자상거래의 확산에 따른 빠른 성장세에 코로나 19로 인한 비대면 소비활동 증가가 결합하며 그 성장세가 더욱 가팔라지고 있다(Park et al., 2021). 소비자들은 생활에 필요한 물건을 구입할 수 있는 방법으로 비대면 온라인 주문을 많이 이용하고 있으며, 택배 서비스는 주문한 물건을 집까지 배송해주어 편리함을 더하고 있다. 그런데 최근 아파트 단지에서 택배 배송과 관련한 사회적 갈등이 이슈로 부각되고 있다.
아파트 단지에서는 안전 등을 이유로 택배 차량 등의 지상 주차를 금지하고 대신 지하 주차장에서의 상 하차 작업을 요구하고 있다. 이때 지하 주차장의 높이가 낮을 경우, 차고가 높은 일반 택배 차량은 진입이 불가능해 저상 택배 차량을 이용할 수밖에 없다. 천장의 높이가 낮은 저상 택배 차량에서는 택배기사들이 중량물 취급 시 중립적 작업 자세가 아닌 택배 물량에 의하여 택배기사와 중량물 중심과의 수평 거리가 멀어지고 허리, 목 등에 불편한 자세가 발생할 수밖에 없어 작업이 불편해진다. Lee et al. (2020)에 따르면 작업자와 중량물 중심과의 수평 거리가 멀수록 어깨에 발생하는 부하가 증가하는 것으로 나타났다. 또한 Baek and Jeon (2021) 연구에서는 642명의 택배 근로자의 건강 관련 노동실태 온라인 설문조사 결과, 80% 이상이 근골격계질환 증상을 호소하였다. 또한, 근골격계질환으로 인한 업무상 질병 사례를 분석한 결과에 의하면 대부분 택배물건을 분류하거나 상 하차 작업 혹은 배송 과정에서 주로 중량물 취급에 따른 허리, 어깨, 다리 등의 부위에 추간판장애나 염좌 등의 근골격계질환이 발생하는 것으로 확인되었다(Kim and Choi, 2021).
택배기사에 관한 다른 연구를 보면 택배기사의 과로지수를 확인한 결과 모두 기준을 초과하는 것으로 나타났으며(Kim and Jin, 2023), 서울시 택배기사 실태조사에 따르면 택배기사의 질병 재해로는 장시간 과중하게 지워진 업무로 인한 근골격계질환이 가장 많이 나타나고 있으며(Lee et al., 2020), 운전과 무거운 물품의 빈번한 운반으로 인하여 근골격계질환 등의 건강 문제가 발생할 가능성이 높다고 보고하였다(Lee, 2019).
그런데 이러한 기존 택배 차량보다도 천장의 높이가 더 낮은 저상 택배 차량이 사용된다면, 택배기사들의 물자취급작업의 부하는 더 높아져 근골격계질환 발생 등에 더 영향을 미칠 것으로 예견된다. 이에 본 연구는 천장 높이가 다른 공간에서 박스를 들기, 내려놓기, 옮기기 동작을 수행하는 동안 3D 동작분석 시스템을 통해 작업 자세를 분석하고, 허리에 미치는 부하 정도를 알아보기로 하였다.
본 연구는 실험연구 방법으로 진행되었다. 실험을 수행하기 위해 가설을 수립하고, 이에 대한 실험을 수행하고 통계분석을 하였다.
2.1 Experimental hypothesis
본 연구에서 실험을 통해 택배 차량의 천장 높이에 따른 택배기사의 L5/S1 압축력(compressive force), 허리 굴곡 각도, 목 굴곡 각도에 유의한 차이가 있다는 것을 검정하고자 하였다.
가설에 대한 독립변수는 내장탑차인 택배 차량의 3가지 천장 높이로 실제 현장에서 주로 사용되는 차량의 규격을 조사해(Table 1), 이를 참고해, 1,300, 1,600, 1,900mm 세 가지 수준으로 설정하였다. 종속변수로는 허리 굴곡 각도, 목 굴곡 각도, 허리 L5/S1의 디스크 압축력으로 설정하였다. 인체 관절 각도를 측정하기 위해 관절에 마커(marker)를 부착하였으며, 이들로부터 얻어진 데이터를 사용해 3DSSPP (3D Static Strength Prediction Program) 프로그램으로 L5/S1 디스크 압축력을 도출하였다.
Delivery vehicle category | Length (mm) | Width (mm) | Height (mm) |
Low-roof delivery vehicle | 2,830 | 1,670 | 1,270 |
Standard delivery vehicle | 2,830 | 1,670 | 1,580 |
High-roof delivery vehicle | 2,830 | 1,670 | 1,800 |
2.2 Design of experiment
택배상자 들기 작업의 자세를 측정하기 위해 3차원 동작분석장비(3D motion analysis system)를 사용하였다. 동작분석장비는 NaturalPoint 사의 OptiTrack (Flex 13)을 이용하여 측정하였다. 카메라는 초당 120 프레임(frame)을 측정하며, 마커의 반사를 이용하여 X, Y, Z 축 상에서 마커의 위치를 추적하였다(Figure 1).

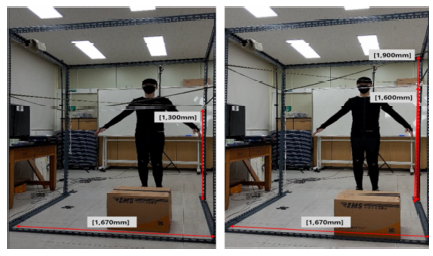
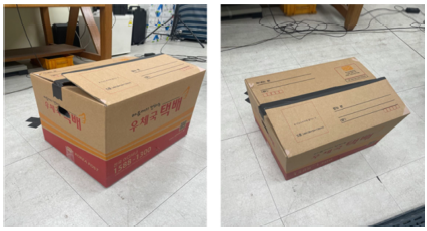
실험장소에 택배 차량의 공간을 구현하기 위해 프레임을 사용해 실제 택배 차량 길이, 폭, 높이를 구현하였다(Figure 2). 총 실험조건은 천장 높이 변화에 따른 3개로 6명의 피실험자는 3개의 조건에 대해 2번씩 반복하여 수행하였다. 작업 방법으로는 천장 높이가 다른 택배 차량 내부에서 인력물자취급 동작 중 들기, 운반하기, 내려놓기를 선정해 한 동작에 박스를 들고 옆으로 옮기는 정리하는 작업으로 실험하였으며, 취급하는 박스의 크기는 우체국박스 1호-5호 중 크기가 가장 큰 박스(우체국 5호 480×380×340mm)에 실험자의 허리 부상을 방지하기 위해 15kg 중량물을 박스에 넣어 실험하였고 3DSSPP 압축력 계산시에는 편의점 택배에서도 접수 가능한 무게 20kg을 기준으로 196N(왼손 98N, 오른손 98N) 설정하였다(Figure 3).
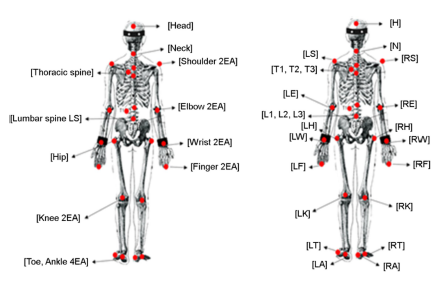
실험 전 피실험자들의 마커를 머리, 목, 흉추, 어깨, 팔꿈치, 손목, 손끝, 허리, 골반, 무릎, 발목, 발에 부착하였다(Figure 4). 3D 동작분석기에서 마커에 대한 X, Y, Z 축 값을 분석 후 분석된 각도를 3DSSPP 프로그램에 프레임 별로 머리, 허리, 상완근, 전완근, 윗다리, 아랫다리 등 수평, 수직 각도를 입력해 프레임 별 L5/S1에서의 압축력을 계산했다. 프레임 당 0.5초씩 계산하여 설정하였고, 피실험자들의 작업속도가 다르기 때문에 피실험자 별 프레임 수가 다를 수 있어, 실험 당 총 24 프레임으로 고정했고 중량물(박스)을 취급하는 프레임은 총 12 프레임을 기준으로 정해 분석했다(Table 2).
Work content | Second | Frame |
Box picking up from entering the work area | 3 | 6 |
Picking up and lifting the box | 2 | 4 |
Holding a box | 2 | 4 |
Move to the side of the box and lower it | 2 | 4 |
Lowering and coming up the box | 2 | 4 |
Come up and stop | 1 | 2 |
2.3 Statistical analysis
통계분석은 SPSS를 사용해 천장 높이(1,300, 1,600, 1,900mm)에 대한 일원배치 분산분석(ONE-Way ANOVA)을 실시하였다. 천장 높이의 수준이 3개이어서 사후분석(post-hoc analysis)으로, Duncan 사후검정을 실시하였다. 가설검정의 유의수준은(α)은 0.05로 설정하였다.
3.1 Results of L5/S1 compression force
6명 피실험자의 천장높이 별 평균 L5/S1 압축력의 결과를 나타내었다(Table 3). 피실험자 S1의 데이터 중 1,900mm 작업장소 높이에 대한 2회차 데이터는 실험 수행 중에 발생한 문제로 획득하지 못했다.
Count | Height (mm) | S1 | S2 | S3 | S4 | S5 | S6 |
1 | 1,300 | 4,217.3 | 3,906.1 | 3,709.5 | 4,069.0 | 3,371.9 | 3,865.2 |
1,600 | 3,491.7 | 3,187.5 | 2,990.0 | 3,471.0 | 3,187.1 | 3,572.7 | |
1,900 | 2,620.7 | 2,885.6 | 2,244.7 | 2,386.0 | 2,640.0 | 2,681.7 | |
2 | 1,300 | 4,220.8 | 3,878.4 | 3,968.4 | 3,876.5 | 3,403.7 | 3,785.6 |
1,600 | 3,553.8 | 2,875.4 | 3,319.6 | 3,599.6 | 3,172.3 | 3,597.0 | |
1,900 | - | 2,407.0 | 2,211.1 | 2,487.5 | 2,544.6 | 2,832.0 | |
Average | 3,620.8 | 3,190.0 | 3,073.9 | 3,314.9 | 3,053.3 | 3,389.0 | |
Standard deviation | 589.4 | 546.4 | 671.2 | 650.3 | 338.1 | 460.4 | |
3.2 Result of waist bending angle
6명의 피실험자 별 높이 3개의 실험조건에 대한 허리 굴곡 각도의 결과를 나타내었다(Table 4).
Count | Height (mm) | S1 | S2 | S3 | S4 | S5 | S6 |
1 | 1,300 | 15.5 | 20.3 | 29.9 | 13.0 | 8.9 | 7.0 |
1,600 | 35.5 | 42.0 | 45.8 | 35.0 | 27.7 | 29.2 | |
1,900 | 54.9 | 49.7 | 60.5 | 58.5 | 52.5 | 52.0 | |
2 | 1,300 | 15.2 | 19.2 | 20.0 | 18.8 | 6.7 | 8.6 |
1,600 | 33.0 | 48.8 | 45.8 | 32.9 | 27.6 | 27.2 | |
1,900 | - | 56.4 | 61.8 | 55.8 | 54.9 | 46.7 | |
Average | 30.8 | 39.4 | 43.9 | 35.7 | 29.7 | 28.4 | |
Standard deviation | 14.7 | 14.5 | 15.1 | 17.0 | 18.8 | 17.1 | |
3.3 Result of neck bending angle
6명의 피실험자 별 높이 3개의 실험조건에 대한 목 굴곡 각도의 결과를 나타내었다(Table 5).
Count | Height (mm) | S1 | S2 | S3 | S4 | S5 | S6 |
1 | 1,300 | -8.79 | 3.86 | -0.81 | -13.57 | -15.89 | -0.89 |
1,600 | -7.49 | -1.74 | -8.11 | -15.39 | -8.94 | 1.94 | |
1,900 | -8.72 | -0.71 | -4.40 | -11.07 | -2.22 | -3.96 | |
2 | 1,300 | -7.73 | -11.07 | -3.05 | -17.50 | -14.06 | 4.85 |
1,600 | -12.12 | -3.34 | -4.58 | -10.95 | -4.63 | 2.62 | |
1,900 | - | -0.47 | -4.23 | -8.57 | -3.69 | -8.31 | |
Average | -5.78 | -3.39 | -8.94 | -11.42 | -4.12 | 0.91 | |
Standard deviation | 1.66 | 4.51 | 2.17 | 2.99 | 5.21 | 4.42 | |
3.4 Descriptive statistical analysis results
NIOSH에서는 L5/S1 compressive force 값의 크기에 따라 행동한계(AL; Action Limit)를 3,400N, 최대허용한계(MPL; Maximum Permissible Limit)를 6,400N을 기준으로 들기 작업의 부하를 분류하고 있다. 1,300mm에서의 L5/S1 압축력은 행동한계인 3,400N을 초과하는 것으로 나타났다. 행동한계와 최대허용한계 사이에 있으면 개선이 요구되는 작업으로 판정한다(NIOSH, 1981). 그러나 1,600mm, 1,900mm에서는 행동한계보다 아래인 것으로 나타났다. 또한 1,300mm에서의 허리 굴곡 각도는 골반 기준에서 15.3도 이상 밖에 안 올라온 거의 골반 높이인 상태로 작업을 하는 것으로 나타났다. 그러나 목 굴곡 각도는 1,300mm에서 -7.05도이고, 1,900mm일 때는 -5.12도로 차이가 크지 않은 것으로 나타났다(Table 6).
Dependent | Height | N | Average | Standard | 95% confidence | Minimum | Maximum | |
Lower limit | Upper limit | |||||||
L5/S1 | 1,300mm | 12 | 3856.0 | 268.1 | 3685.7 | 4026.4 | 3371.9 | 4220.8 |
1,600mm | 12 | 3334.8 | 249.9 | 3176.1 | 3493.6 | 2875.4 | 3599.6 | |
1,900mm | 11 | 2540.1 | 219.3 | 2392.8 | 2687.4 | 2211.1 | 2885.6 | |
Total | 35 | 3263.7 | 593.8 | 3059.8 | 3467.7 | 2211.1 | 4220.8 | |
Angle of | 1,300mm | 12 | 15.3 | 6.9 | 10.9 | 19.6 | 6.7 | 29.9 |
1,600mm | 12 | 35.9 | 7.8 | 30.9 | 40.9 | 27.2 | 48.8 | |
1,900mm | 11 | 54.9 | 4.5 | 51.9 | 57.9 | 46.7 | 61.8 | |
Total | 35 | 34.8 | 17.5 | 28.8 | 40.8 | 6.7 | 61.8 | |
Angle of | 1,300mm | 12 | (7.1) | 7.7 | (12.0) | (2.2) | (17.5) | 4.9 |
1,600mm | 12 | (6.1) | 5.5 | (9.6) | (2.6) | (15.4) | 2.6 | |
1,900mm | 11 | (5.1) | 3.5 | (7.5) | (2.8) | (11.1) | (0.5) | |
Total | 35 | (6.1) | 5.8 | (8.1) | (4.1) | (17.5) | 4.9 | |
3.5 Analysis of variance results
작업장소 높이에 대한 일원배치 분산분석 결과를 나타내었다(Table 7). 분산분석 결과 작업장소의 높이는 허리 굴곡 각도와 L5/S1 압축력에 통계적으로 유의한 차이를 보였다(p=0.001). 목 굴곡 각도는 통계적으로 유의한 차이가 없었다(p=0.736).
| Squares | N | Mean squared | F | p-value | |
L5/S1 | Group-to-group | 10,030,838.01 | 1 | 5,015,419.01 | 81.97 | 0.001 |
Collective-within | 1,958,015.63 | 32 | 61,187.99 |
|
| |
Total | 11,988,853.65 | 34 |
|
|
| |
Angle of | Group-to-group | 9,032.45 | 2 | 4,516.22 | 103.24 | 0.001 |
Collective-within | 1,399.89 | 32 | 43.75 |
|
| |
Total | 10,432.34 | 34 |
|
|
| |
Angle of | Group-to-group | 21.45 | 2 | 10.72 | 0.31 | 0.736 |
Collective-within | 1,108.66 | 32 | 34.65 |
|
| |
Total | 1,130.11 | 34 |
|
|
| |
본 연구에서는 높이가 다른 공간에서 박스를 들기, 옮기기, 내려놓기, 동작을 수행할 동안 3차원 동작분석 시스템을 이용하여 작업 자세에 대한 허리 부위에 부하를 얼마나 주는지 3DSSPP (3D Static Strength Prediction Program) 프로그램을 이용해 평가하는 실험연구를 수행하였다. 일원배치 분산분석 결과 천장 높이의 변화에서는 L5/S1에 압축력과 허리 굴곡 각도에 유의한 차이를 보였다(p=0.001). 천장 높이 1,300mm에서의 들기 작업은 3DSSPP 기준 평균 L5/S1에 압축력의 행동한계 3,400N을 초과하는 것으로 나타났다. 이에 따라 행동한계를 초과하는 1,300mm 이하 작업장소에서는 중량물을 취급하는 작업은 지양되어야 할 것이다.
이러한 문제를 근본적으로 해결하기 위해서는 중량물을 취급하는 택배 작업에서는 저상 택배차량을 금지하거나, 아파트 등의 지하 주차장 천장고를 높여서 일반 택배차량이 진입할 수 있도록 해야 한다. 현재 문제는 지하 주차장 높이가 2.7m 이상으로 설정된 2019년 이전에 지어진 아파트들이 문제이다. 이때의 아파트들의 지하 주차장 높이는 2.3m에 맞추어 건설되었다.
그렇다면 이런 경우, 세 가지 방법으로 저상 택배 차량 내 작업을 지양할 수 있다. 첫 번째는 지상으로 택배 배송을 할 수 있게 만드는 방법과, 두 번째 방법은 저상 택배 차량을 3면을 다 개폐할 수 있게 만드는 것이다. 일반 3면 개폐 차량 높이는 윙바디 탑차(2,675mm), 다용도 탑차(2,320mm)로 2,300mm인 지하 주차장에 진입할 수 없다. 이에 저상 택배 차량도 3면 개폐가 가능할 수 있도록 설계를 한다면 차량 내부에서 작업이 적어질 것이고 그만큼 근골격계 부담도 적어질 것으로 판단된다. 세 번째는 장기적으로 아파트 입구에서 집 앞까지 인공지능 기술과 카메라, 라이다 센서를 이용하여 자율주행으로 택배를 운반해줄 수 있는 '자율주행 택배 운반 로봇' 기술을 이용하는 것이다(Park et al., 2022; Kim, 2021). 이러한 저상 택배 차량에서 작업이 아닌 다른 운송수단을 개발하는 것도 하나의 방법이 될 것이다.
References
1. Baek, H.J. and Jeon, Y.L., Labor of courier working hours and health problems, Korea Institute of Industrial Safety and Health, 30-35, 2021.
2. Kim, H.Y. and Jin, S.E., A Quantitative Investigation of the Workload in the Delivery Worker, Journal of Ergonomics Society of Korea, 42(1), 29, 2023.
3. Kim, J.H. and Hwang, M.Y., Courier working environment problems and improvement measures, Policy Report, Seoul Institute, 1-24, 2021.
4. Kim, M.J. and Choi, E.S., Occupational Accident Compensation Insurance Coverage and Occupational Accidents for Special-type Delivery Workers, Korean Academy of Community Health Nursing, 64-72, 2021.
Google Scholar
5. Kim, S.Y., A Study on the collision avoidance system between aircraft and drones due to the activation of the drone industry, Journal of the KIECS, 16(5), 969-974, 2021.
6. Lee, H.J., Kim, Y.C. and Im, Y.J., A Study on the Evaluation of the Load on the Shoulder in Manual Materials Handling Tasks, Journal of Ergonomics Society of Korea, 39(5), 475, 2020.
7. Lee, S.H., Kim, P.U. and Kim, S.J., Muscle Assisted Uniform for Preventing Musculoskeletal Disease for Delivery Man, Korean Society of Design Science, 209-210, 2020.
8. Lee, Y.J., A Convergence Study on Working Conditions and Health related Factors Influencing Well-being in Door to Door Deliverers, Journal of the Korea Convergence Society, 10(1), 329-338, 2019.
9. Ministry of Land, Infrastructure, and Transport 'Measures to prevent overwork of couriers' to ensure that couriers work healthily, 2020.
10. NIOSH, Work practice guide for manual lifting. NIOSH technical report. US Department of Health and Human Services, Cininnati, OH, National Institute for Occupational Safety and Health, 1981.
11. Park, H.Y., Kim, S.Y., Jung, S.J. and Seo, S.B., Changes in the use of domestic courier services due to the spread of COVID-19, Transportation Research, 51-66, 2021.
12. Park, M.C., Kim, K.H. and Jeon, H.S., Apartment-type Self-Driving Courier Delivery Robot, Proceedings of the 65th Winter Conference of the Korean Computer and Information Society, 30(1), 301-302, 2022.
13. Seo, S.B., Jeong, S.J., Kim, S.H. and Park, H.Y., A study on the post COVID-19 response strategy of transportation sector – Future innovation strategies of the logistics industry to meet the contactless society and non-contact economy, The Korea Transport Institute, 2021.
PIDS App ServiceClick here!